自動キャリブレーション
キャリブレーション準備
標準インターフェース通信設定が完了した後、ロボットを接続して自動キャリブレーションを行うことができます。自動キャリブレーションは、下図のようなフローで行います。
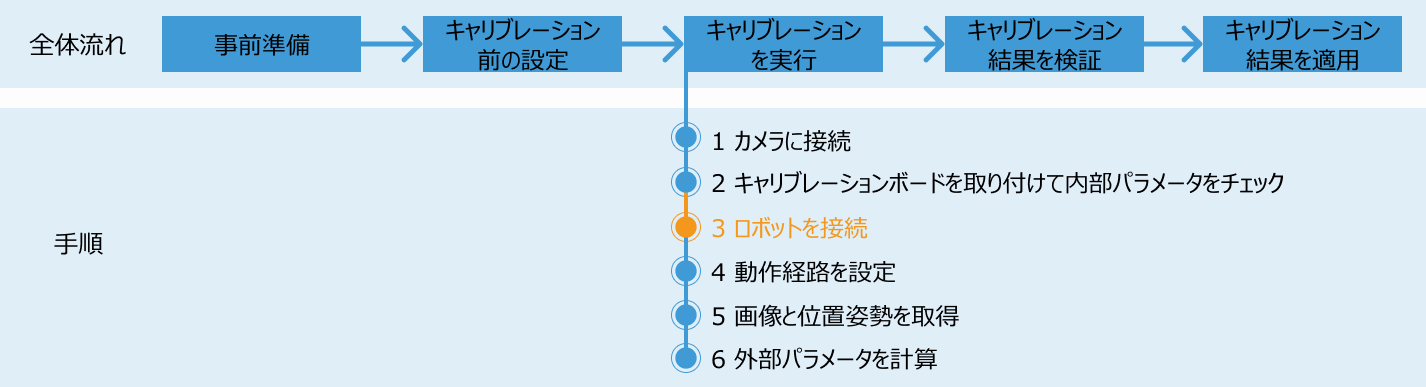
キャリブレーションを実行する際に、ロボットを接続し、Mech-Visionソフトウェア画面に ロボットとの接続を待機中… が表示された場合、本文の手順に従ってロボット側で操作を行ってください。ロボット側の操作が完了したら、Mech-Visionソフトウェアに戻り、残りの手順を続けて実行してください。
|
キャリブレーションプログラムを選択
-
こちら をクリックしてキャリブレーションプログラムをダウンロードし、解凍します。ここでは MM3DVSCALR.prg を用いて行います。
-
RT ToolBox3 ソフトウェアを起動します。
-
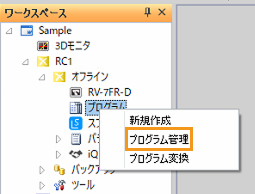
左側の ワークスペース で をクリックし、プログラム を右クリックして プログラム管理 を選択します。
-
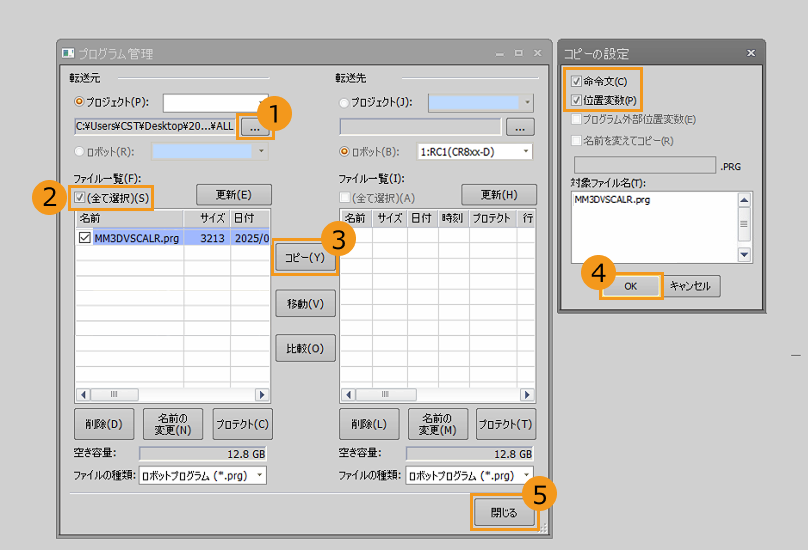
ポップアップウィンドウで以下の操作を行います。
-
... をクリックします。
-
表示されたウィンドウで、解凍したフォルダから MM3DVSCALR.prg を選択して OK をクリックします。
-
全選択 にチェックを入れます。
-
コピー をクリックします。
-
ポップアップウィンドウで、命令文 と 位置変数 にチェックを入れ、OK をクリックします。右側のファイル一覧にコピーされたファイル名が表示されることを確認し、閉じる をクリックします。
-
キャリブレーションの初期位置を設定
-
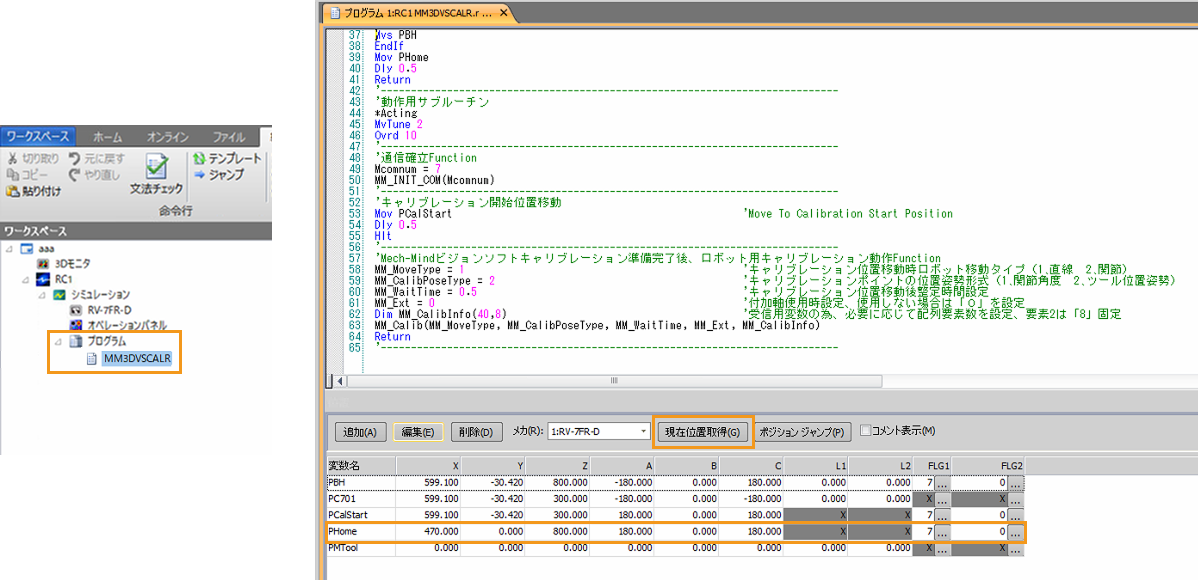
ワークスペース で MM3DVSCALR.prg をクリックすると、右側パネルに詳細情報が表示されます。
-
キャリブレーション開始前に、現在位置取得 をクリックしてロボットの現在位置(任意位置)を PHome として登録します。
-
ロボットを手動でキャリブレーション開始位置へ移動してから、再度 現在位置取得 をクリックして PCalStart として登録します。
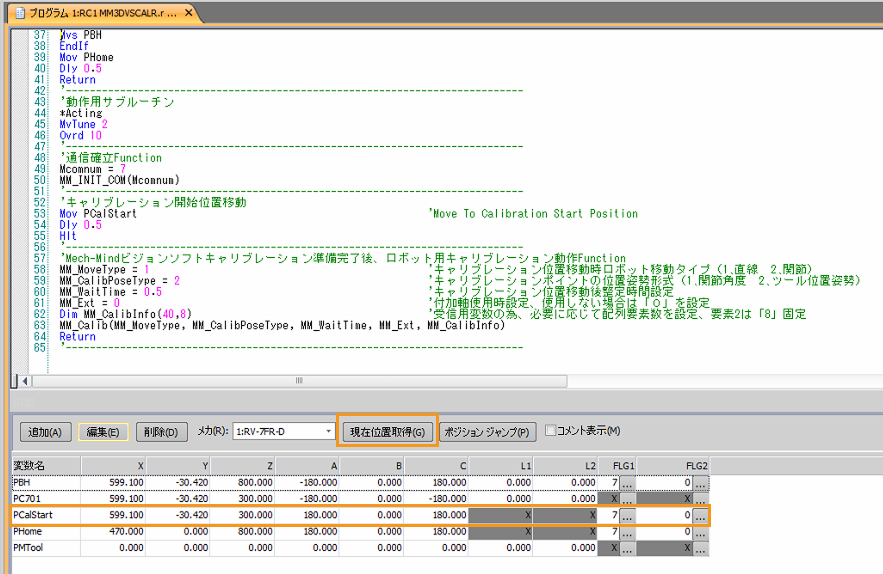
キャリブレーション開始位置は、キャリブレーションボードの位置と点群品質を確認 する際にロボットがいた位置を選択できます。
-
位置を変更した後、Ctrl + S を押してロボットへ書き込みを行ってください。
-
これで、PHome および PCalStart をキャリブレーションの初期位置として再教示されます。
キャリブレーションプログラムを実行
-
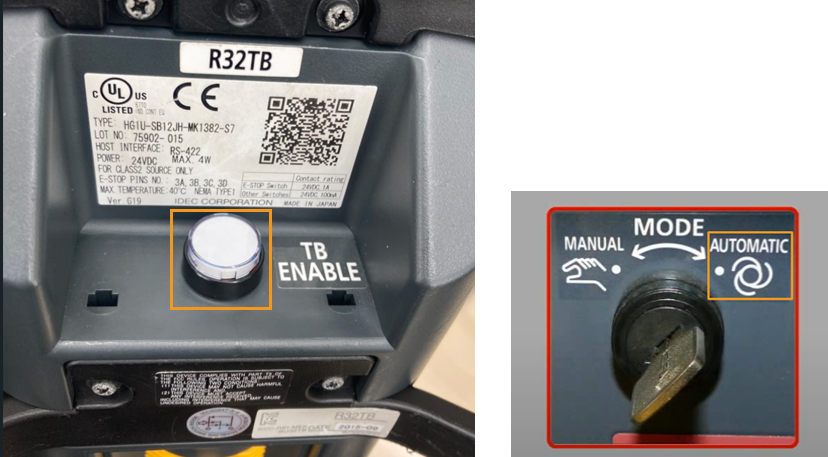
ティーチングボックス背面の TB ENABLE スイッチを押し、ティーチング操作を無効にします(TB ENABLE スイッチのランプが消灯)。その後、コントローラのモードを AUTOMATIC に切り替えます。
-
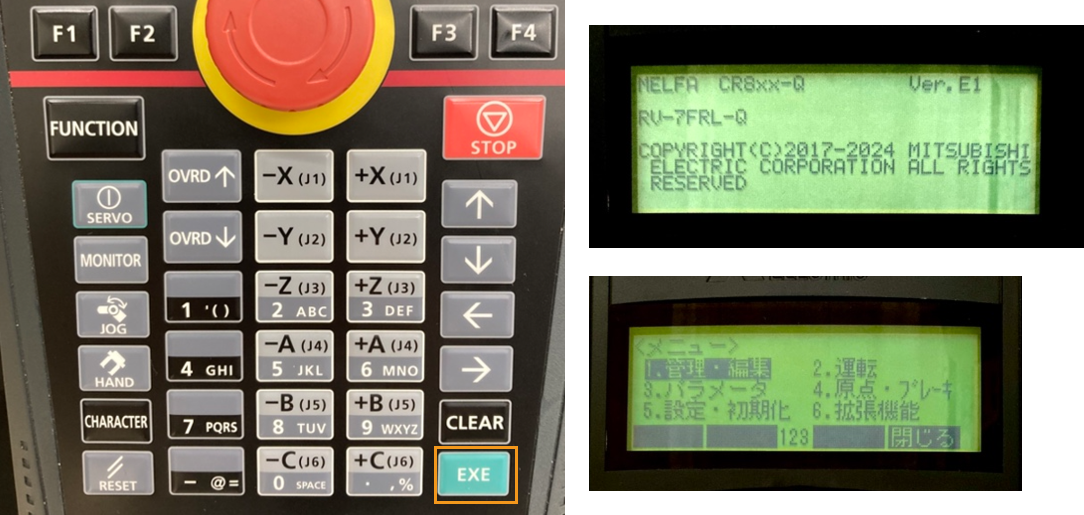
ティーチングボックスの初期画面で EXE を押し、メニュー画面に入ります。
-
メニュー画面で → キーを使用して 運転 を選択し、EXE を押して運転画面に進みます。
-
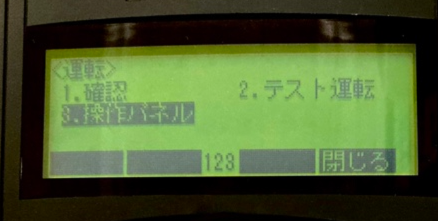
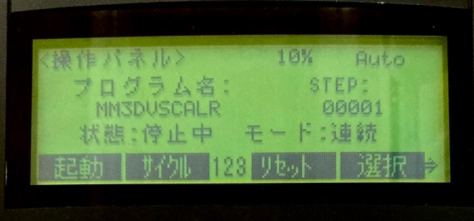
運転画面で ↓ キーを使用して 操作パネル を選択し、EXE を押して操作パネルに入ります。
-
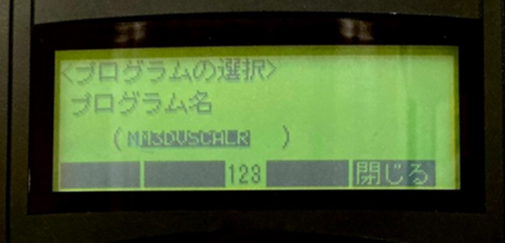
「選択」に対応する機能キー F4 を押し、プログラム選択画面に入ります。
-
プログラム名の入力欄に、使用するプログラム名 MM3DVSCALR を入力し、EXE を押します。
-
「SV.ON」に対応する機能キー F1 を押してサーボ電源をオンにします。「SV.ON」が表示されない場合は FUNCTION を押します。
-
「起動」に対応する機能キー F1 を押すと確認画面が表示されます。
-
「はい」に対応する機能キー F1 を押すと、選択したプログラムが自動で実行されます。
-
安全を確認した上でプログラムを実行してください。
-
キャリブレーションの経路設定を間違えると、ロボットが予期しない経路点に移動することがあります。 初めは必ず速度を低く設定してください。
-
-
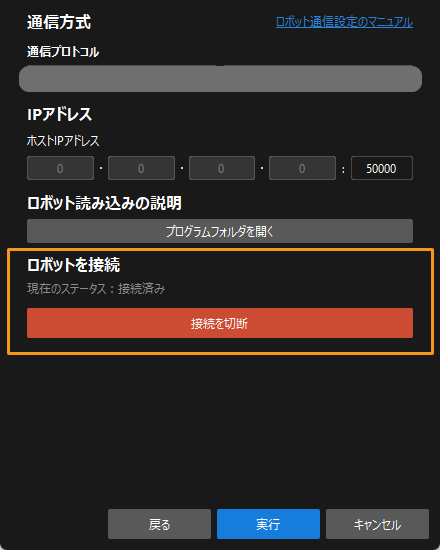
Mech-Visionの キャリブレーション 画面に戻り、ロボットを接続 の下に「接続済み」の状態が表示され、ボタンが ロボットとの接続を待機中… から 接続を切断 に変わったら、次へ をクリックします。
-
次に、キャリブレーションを実行 の4番目の手順(動作経路を設定)以降の操作を進めます。以下の内容を参照してください。
-
すべての作業が完了したら、ロボットを PHome に移動させて自動キャリブレーションは完了です。