FANUCロボットで標準インターフェースプログラムをバックグラウンドで実行する方法
FANUCロボットの場合、メインタスクがサブタスクを呼び出す際、メインタスクはフォアグラウンドで、サブタスクはバックグラウンドで実行されます。バックグラウンドプログラムは、ロボットが起動した後、自動実行される必要があります。以下では、FANUCロボットで標準インターフェースプログラムをバックグラウンドで実行する方法を説明します。
| 設定を開始する前に、FANUCロボットの標準インターフェース通信設定 が完了したことを確認してください。 |
-
バックグラウンドで実行するサブタスクを新規作成します。例のコードは、Mech-Visionプロジェクトを実行し、ビジョン結果を取得するために使用されます。

-
プログラムを選択し、詳細 をクリックします。グループマスク を全て * に変更します。それは、このプログラムが運動グループに入っていないと意味します。中断を無視 を ON にします。それは、このプログラムが外部の中断信号を無視すると意味します。
-
実際のワークフローに応じて、メインタスク(フォアグラウンドプログラム)を新規作成します。例のコードは、メインタスクで RUN コマンドを使用して、バックグラウンドプログラムをサブタスクとして実行させます。F[1]がONの場合、メインタスクがサブタスクを呼び出します。
RUNコマンドはバックグラウンドプログラムを実行させますが、フォアグラウンドプログラムの実行を中断させません。 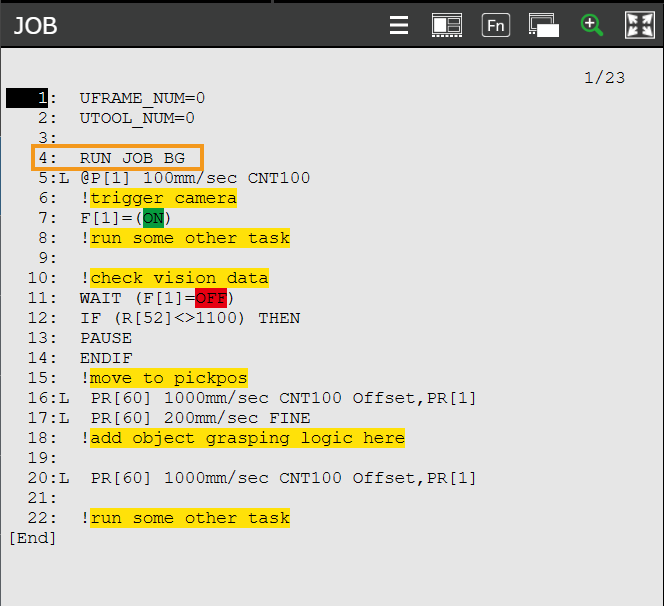
-
上記のフォアグラウンドプログラムを実行します。詳細は、キャリブレーションプログラムの実行 をご参照ください。