自動キャリブレーション
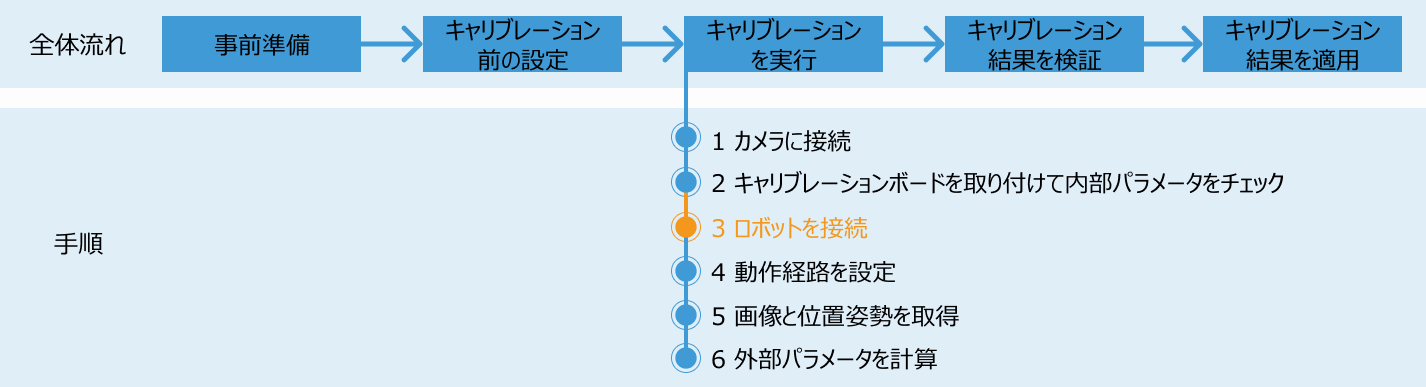
標準インターフェース通信設定が完了した後、ロボットを接続して自動キャリブレーションを行うことができます。自動キャリブレーションは、下図のようなフローで行います。
注意事項
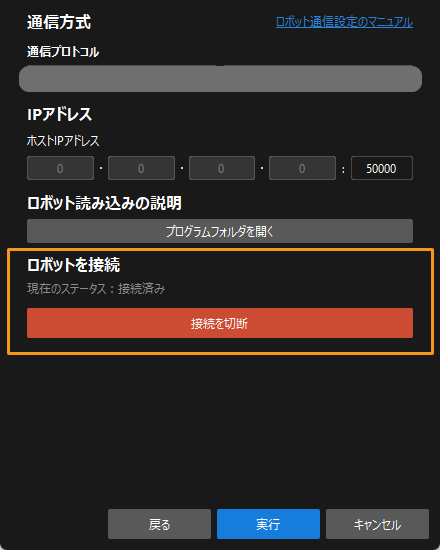
キャリブレーションを実行する際に、ロボットを接続し、Mech-Visionソフトウェア画面に ロボットとの接続を待機中… が表示された場合、本文に記載された手順に従い、ロボット側で操作を行ってください。操作が完了した後、Mech-Visionソフトウェアで残りの手順を続けて実行してください。
|
1. キャリブレーションプログラムの作成
-
ロボットの電源が入っていない場合は、ティーチペンダントの ホームページ で 電源オン をクリックし、有効なペイロードを確認した後、 をクリックします。すでに電源が入っている場合は、この操作を省略し、次のステップに進んでください。

-
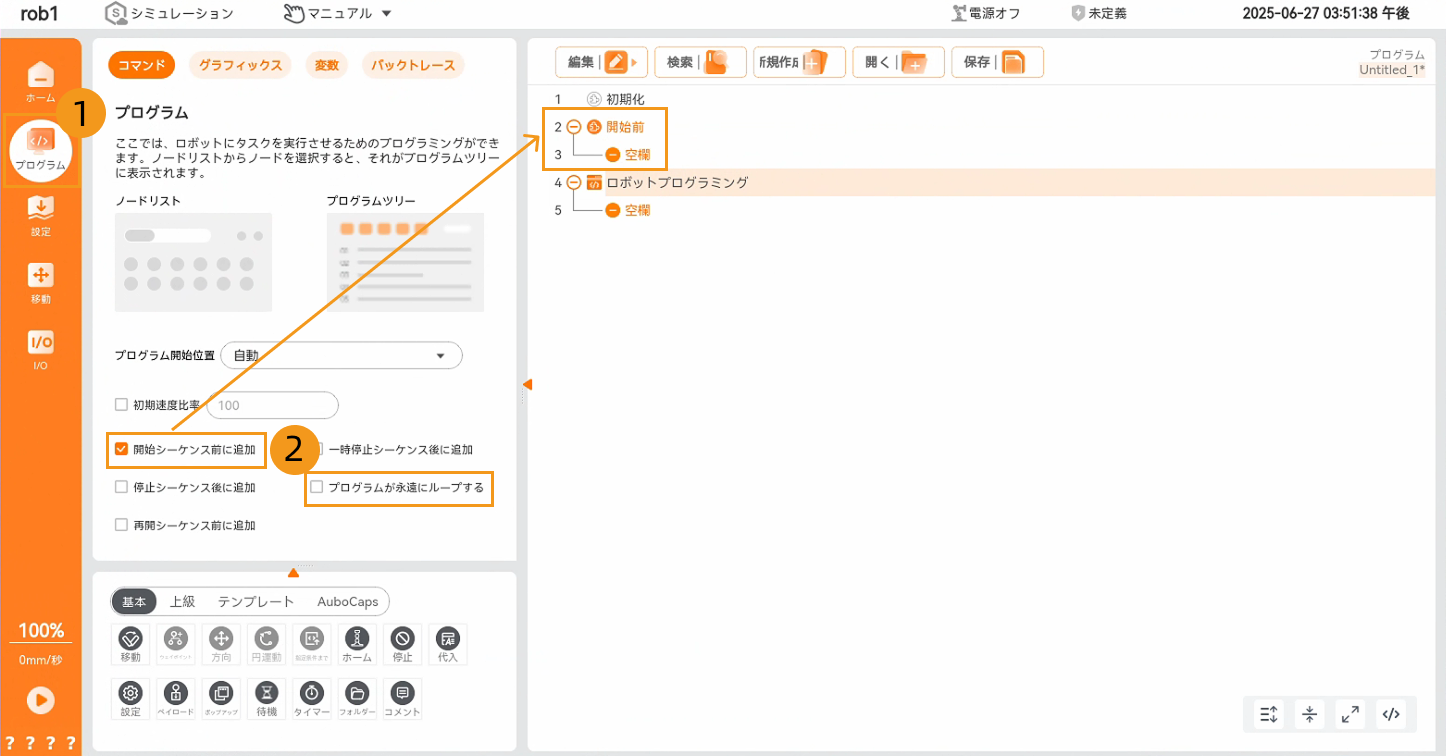
ティーチペンダント画面で プログラム をクリックし、開始シーケンス前に追加 にチェックを入れ、プログラムが永遠にループする のチェックを外します。右側のプログラム画面に 開始前 セグメントが表示されます。
-
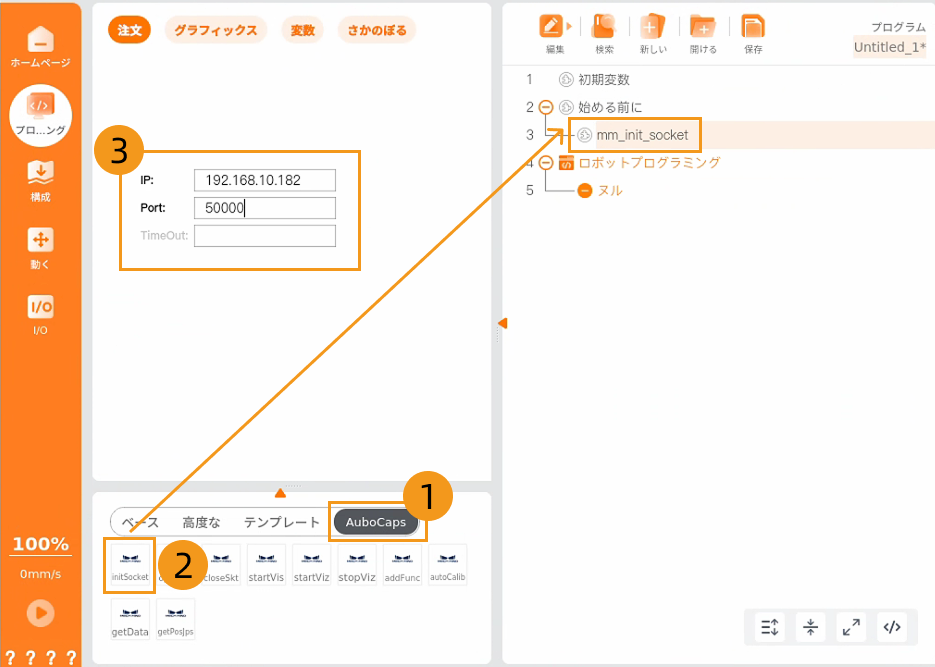
AuboCaps をクリックし、始める前に セグメント内の 空欄 を選択し、initSocket をクリックして mm_init_socket をプログラムに追加します。注文 タブで、IP にIPCのIPアドレス、Port にMech-Visionで設定されたホストポート番号を入力します。
-
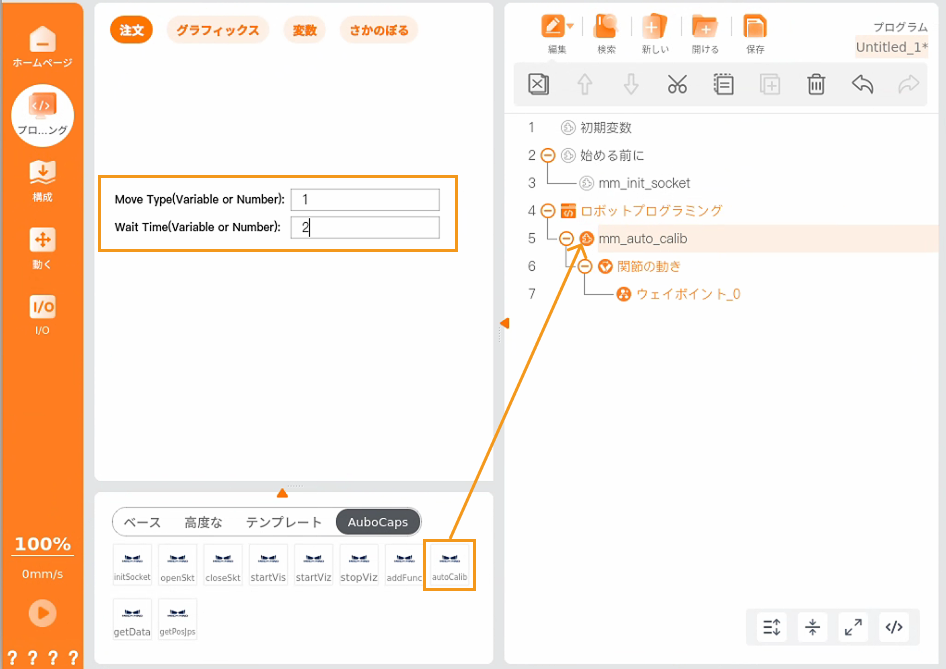
ロボットプログラミング の下の autoCalib をクリックし、mm_auto_calib をプログラムに追加します。実際の状況に応じて Move Type と Wait Time を入力します。パラメータの詳細については、autoCalib コマンドをご参照ください。
2.キャリブレーションの初期位置を設定
-
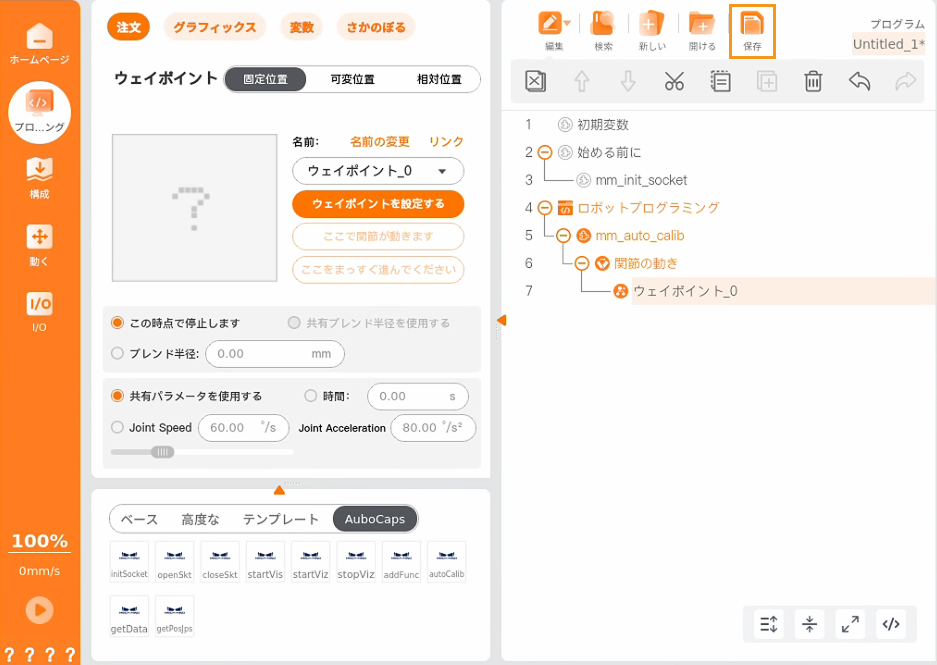
プログラミング 画面で、 をクリックします。

-
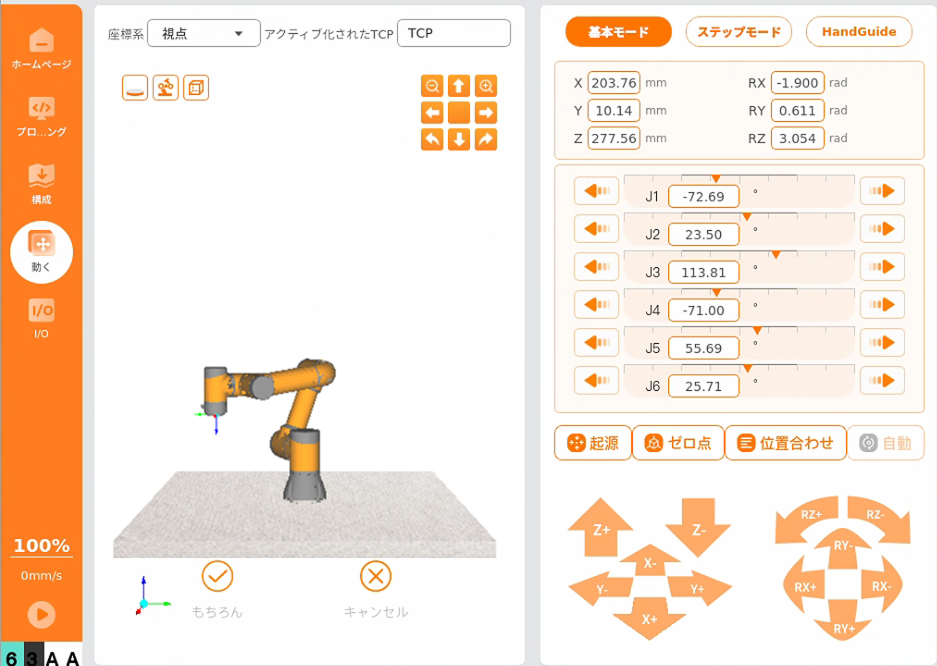
以下の画面で、ロボットをキャリブレーション開始位置まで移動させてから 確認 をクリックし、プログラミング 画面に戻ります。この時点で、ウェイポイント_0 がキャリブレーション開始点となります。
キャリブレーションの開始点は、キャリブレーションボードの位置と点群品質を確認 する時にロボットがいた位置を選択することができます。
-
保存 をクリックし、上記のプログラムを保存します。