標準インターフェース通信設定
以下では、JAKAロボットの標準インターフェースの通信設定について説明します。
コントローラーバージョンを確認
標準インターフェースのプログラムを読み込む前に、コントローラのバージョンが1.7であるか確認します。
-
1.7バージョン以下の場合にアップグレードしてください。以下の操作はJAKAのaddonを使用するので1.7バージョンのロボットコントローラーを使用してください。
1.7は、動作確認時に使用されたバージョンです。1.7以降のバージョンについても、本文を参考に操作をお試しください。問題が発生した場合は、Mech-Mindのテクニカルサポートまでお問い合わせください。 -
コントローラーをアップグレードできない場合は、標準プログラムによる標準インターフェース通信 を実装してください。この場合、addon プラグインプログラムのインストールは不要で、コントローラーのバージョンに特定の要件もありません。
ネットワーク接続を確立
ハードウェア接続
ハードウェアを接続するには、以下のいずれかの方式を使用します。
-
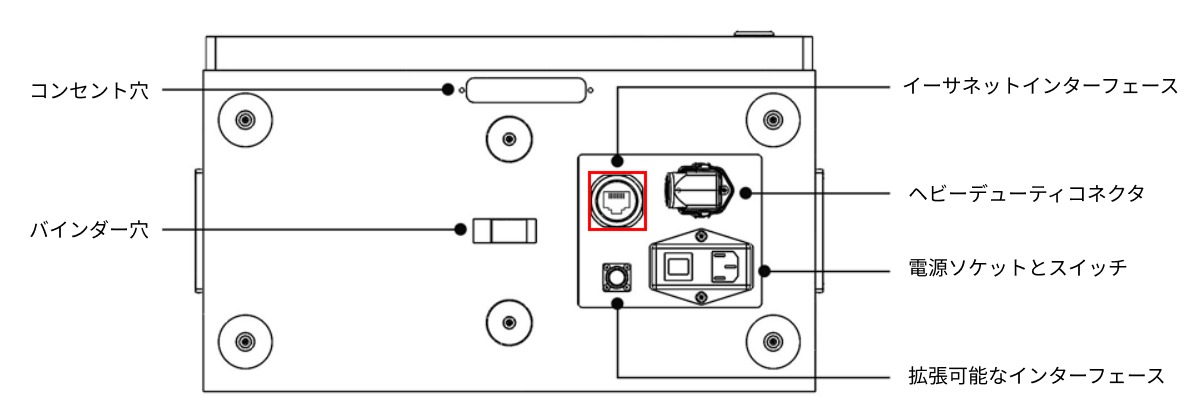
下図に示すように、IPCのLANケーブルをコントローラのイーサネットポートに接続します。
-
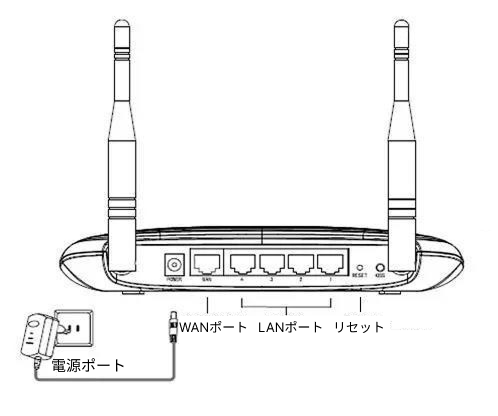
IPCとコントローラのLANケーブルを同じルーターに接続して、ロボットとIPCはルーター経由で同じネットワークセグメントに接続されます。
IPアドレスを設定
-
IPCで JAKA公式サイト にアクセスし、JAKA Appをダウンロードします。JAKA Appのバージョンがコントローラーのバージョンが一致することを確認してください。
-
ティーチペンダントでロボットを制御する場合は、JAKA Appをダウンロードする必要はありません。
-
ここでは JAKA App V1.7.0 を例に説明します。それ以外のバージョンを使用する場合、画面や機能が異なることがありますが、設定手順はほぼ同じです。
-
-
JAKA APPを起動して、メインインターフェイスの右上の 未接続 をクリックして ロボット接続 の画面に入ります。
 をクリックしてパスワード入力画面に入ります。
をクリックしてパスワード入力画面に入ります。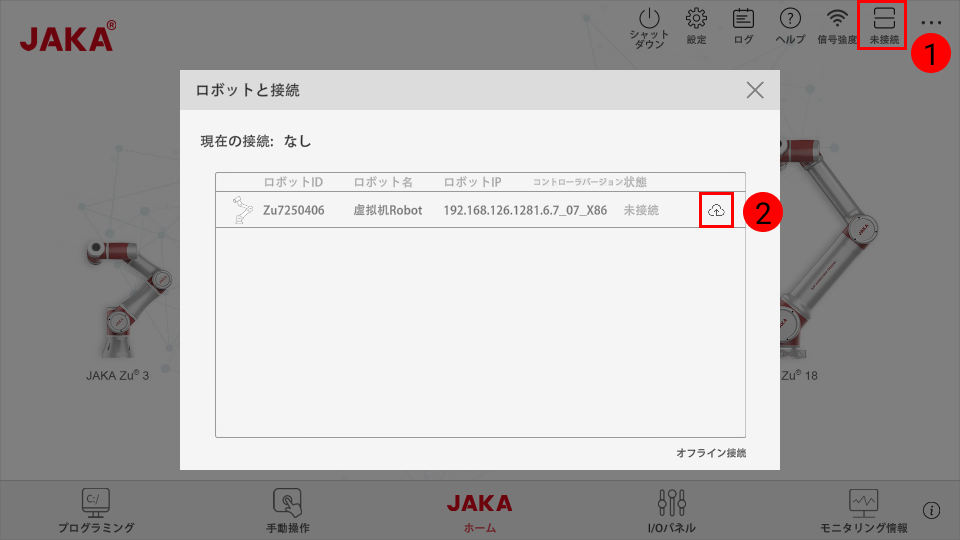
-
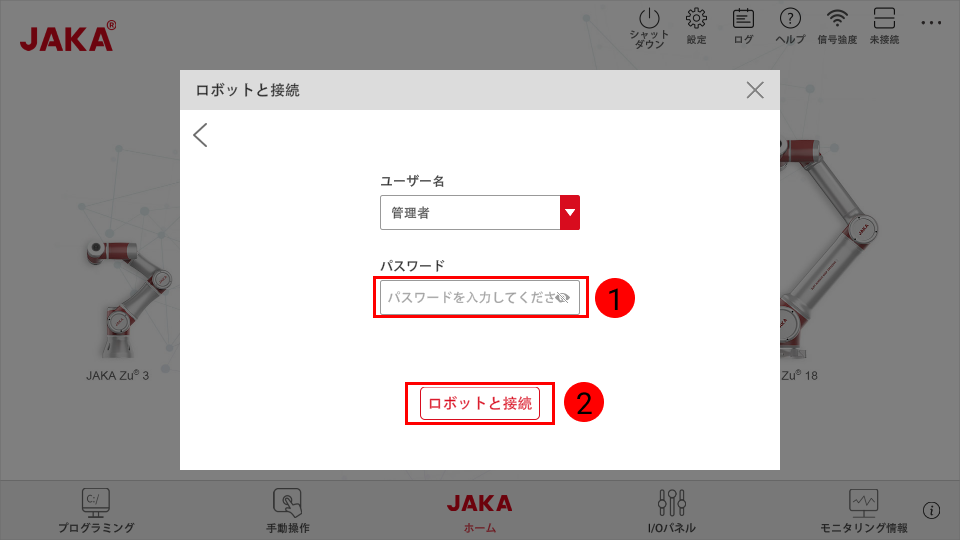
管理者のパスワード(デフォルトでは jakazuadmin)を入力して ロボットと接続 をクリックします。
-
下図の画面が表示されたら、ロボットに接続したことになります。

-
電源オン をクリックしてから ロボット起動 をクリックしてロボットに電源を入れます。
ロボット電源を入れた後、メッセージウィンドウがポップアップしたら、必ずロボットハンドの可搬重量を記入してください。そうしないと、ロボットが起動直後に大きく変動し、危険を引き起こしやすくなります。 
-
メインインターフェイスの右上隅にある 設定
 をクリックして、 をクリックすればIPを設定することができます。JAKA APPとJAKAロボットを同じネットワークセグメントに設定してください。
をクリックして、 をクリックすればIPを設定することができます。JAKA APPとJAKAロボットを同じネットワークセグメントに設定してください。
-
IPCのIPアドレスを設定 します。
IPCのIPアドレスとロボットのIPアドレスは、同じネットワークセグメントに設定する必要があります。
「ロボット通信設定」を実行
-
Mech-Visionを起動します。表示される画面に応じて、以下のようにソリューションの作成方法を選択します。
-
ようこそ画面が表示されたら、ソリューションを新規作成 をクリックして新しい空白のソリューションを作成します。
-
メイン画面が表示されたら、メニューバーの をクリックして新しい空白のソリューションを作成します。
-
-
Mech-Visionのツールバーで ロボット通信設定 をクリックします。
-
ロボット通信設定 の画面で以下の設定を行います。
-
ロボットを選択 ドロップダウンリストから 適応可能なロボット を選択して ロボット型番を選択 をクリックします。表示される画面で特定のロボット型番を選択して 次へ をクリックします。
-
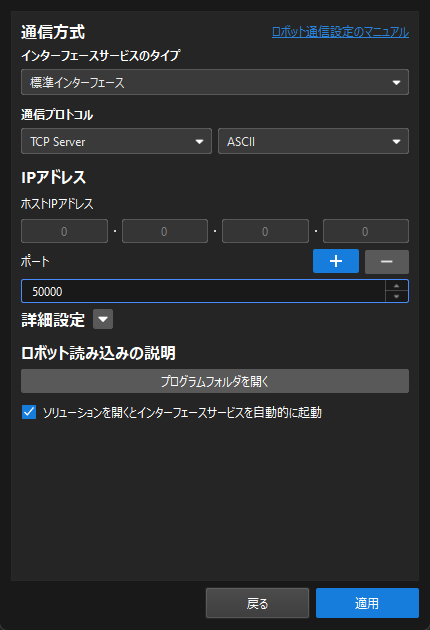
通信方式 の画面で、インターフェースサービスのタイプ を 標準インターフェース に、通信プロトコル を TCP Server に、プロトコル形式 を ASCII に選択します。
-
ポート番号は50000または50000以上に設定することを推奨します。設定したポート番号が他のプログラムに使用されていないことを確認してください。
-
(オプション)ソリューションを開くとインターフェースサービスを自動的に起動 にチェックを入れることを推奨します。
-
適用 をクリックします。
-
-
Mech-Visionのメイン画面で、ツールバーのインターフェースサービスが起動されていることを確認します。
ファイルの読み込み
addonプラグインの読み込み
-
IPCでは、
Communication Component\Robot_Interface\Robot_Plugin\JAKA_Addonパスを開き、コントローラーのバージョン(例えば1.7.0バージョン)に対応するフォルダを開いてmm_custom_cmd.tar.gzファイルをJAKA Zu APPがインストールされているデバイスにコピーします。 -
右上の 設定 をクリックします。
-
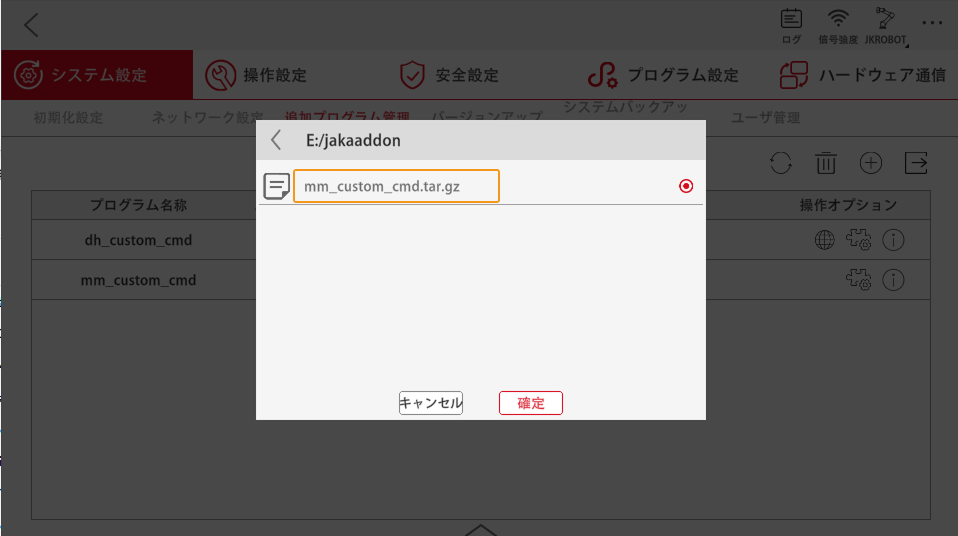
追加プログラム管理 → + → ··· をクリックしていきます。

-
mm_custom_cmd.tar.gzファイルを選択し、確認 をクリックします。するとmm_custom_cmdのプログラム情報が表示されます。
-
mm_custom_cmdの起動ボタンをクリックします。

サンプルプログラムの読み込み
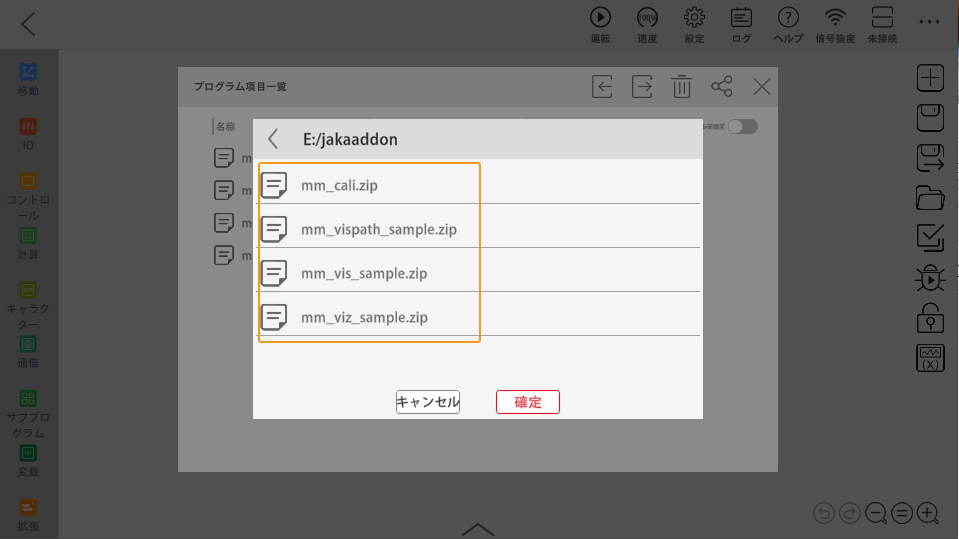
IPCでは、Communication Component\Robot_Interface\Robot_Plugin\JAKA_Addon パスを開き、コントローラーのバージョン(例えば1.7.0バージョン)に対応するフォルダを開きます。mm_cali.zip、mm_vis_sample.zip、mm_vispath_sample.zip、mm_viz_sample.zipファイルはサンプルプログラムファイルです。事前にサンプルプログラムファイルをJAKA Zu APPがインストールされているデバイスにコピーしてください。
-
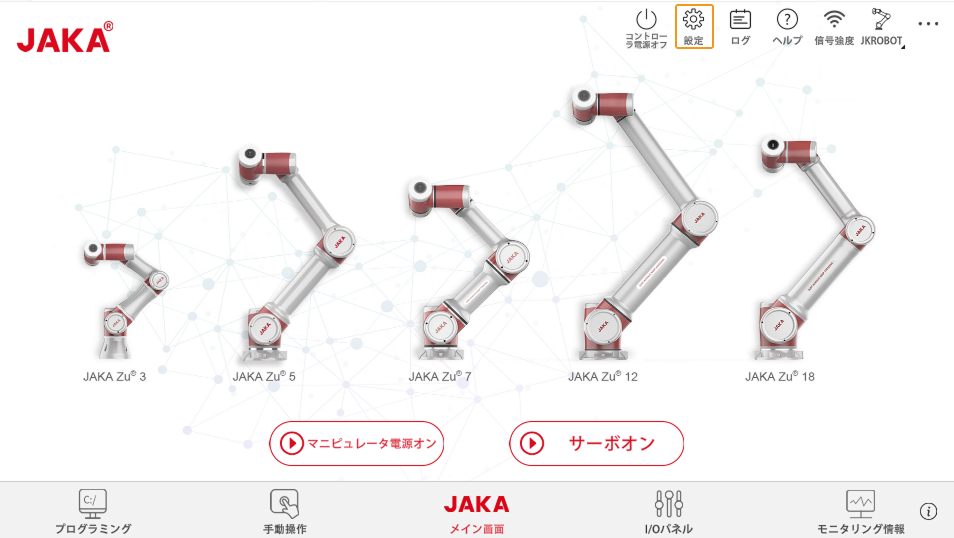
JAKAのメイン画面に戻り、左下の プログラミング をクリックします。
-
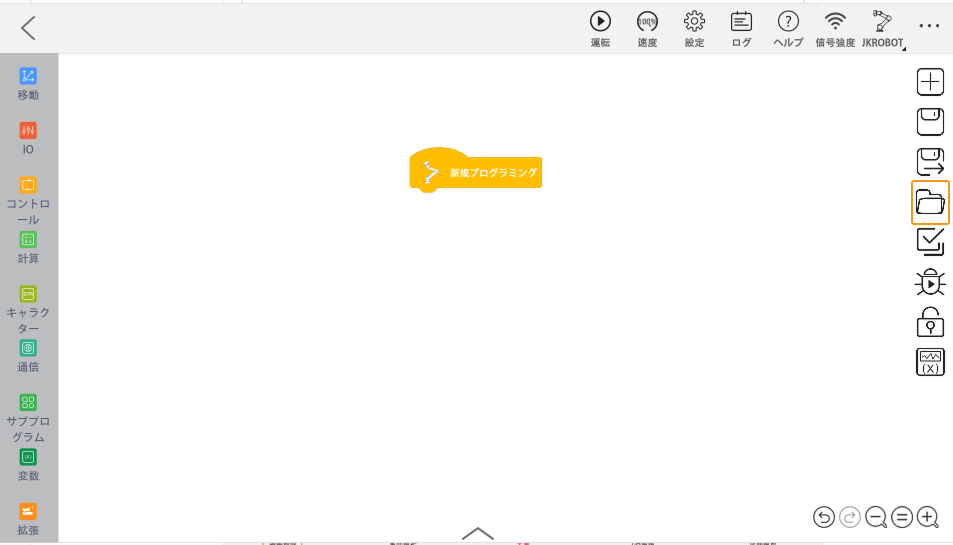
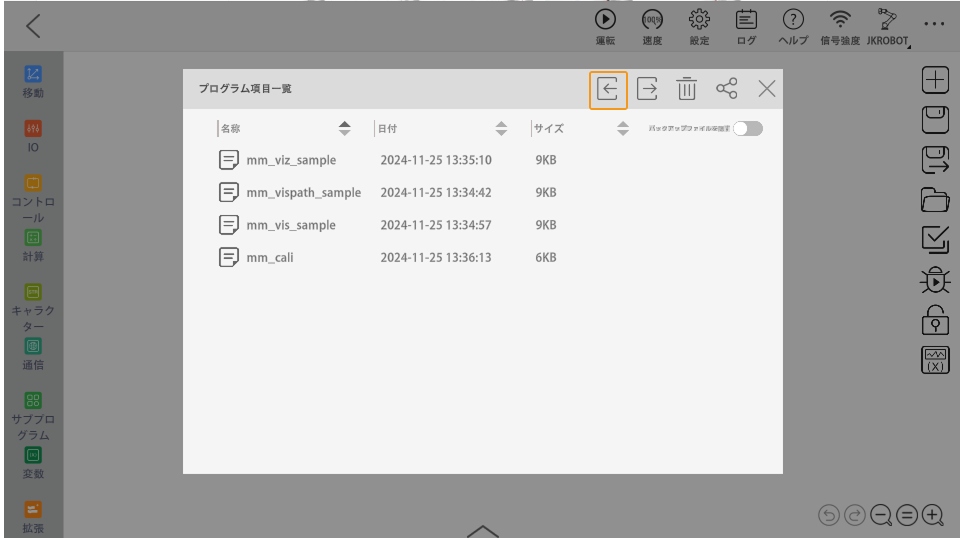
右側の フォルダ アイコンをクリックしてフォルダを開きます。
-
インポート をクリックします。
-
以下のファイルを選択して 確認 をクリックします。
環境変数を作成
プログラムを実行する前に、まず2つのシステム変数を作成する必要があります。作成しないとプログラム実行時にエラーが発生します。
-
JAKAのメイン画面に戻り、右上の 設定 をクリックします。
-
プログラミング設定→*システム変数* をクリックし、右上の + をクリックしてMM_CMDとMM_STATUSの2つの変数を作成します。初期値は0です。

ロボットの接続状態をテスト
-
JAKAのメイン画面に戻り、左下の プログラミング をクリックします。
-
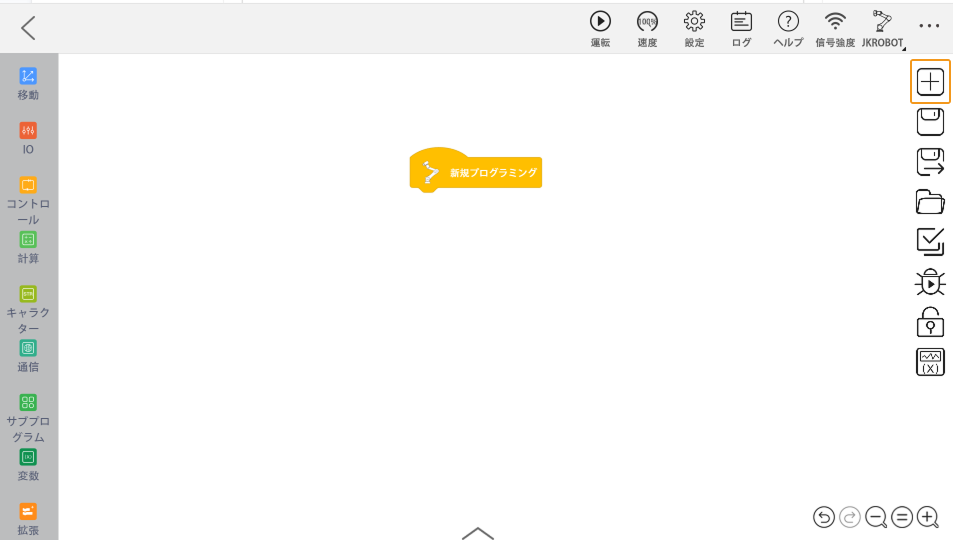
右の + をクリックしてプログラムを新規作成します。
-
左の 拡張 をクリックし、MM_Connect を 新規プログラミング にドラッグしてIPCのIPアドレスとポート番号を設定します。
IPCのIPアドレスは、ロボットのIPアドレスと同じネットワークセグメントにある必要があります。 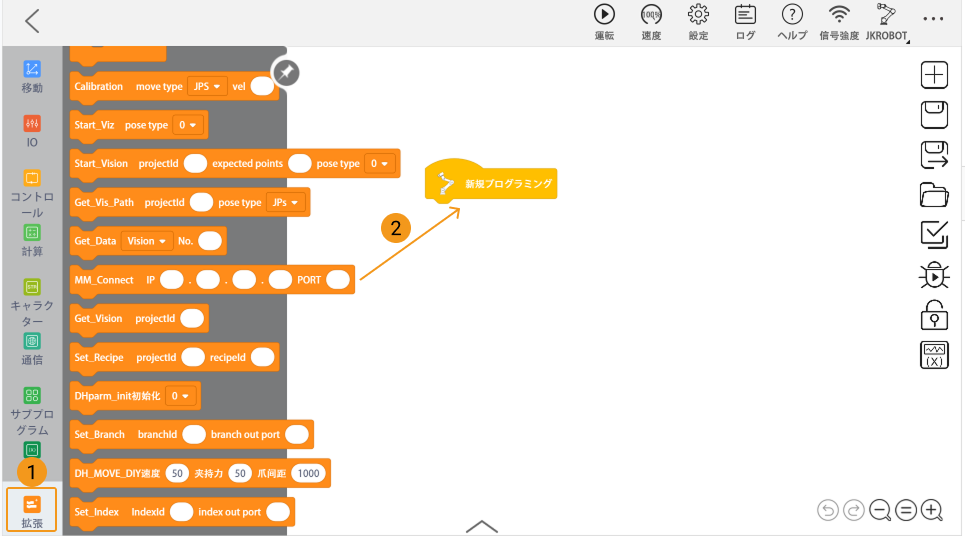
-
運転 をクリックします。
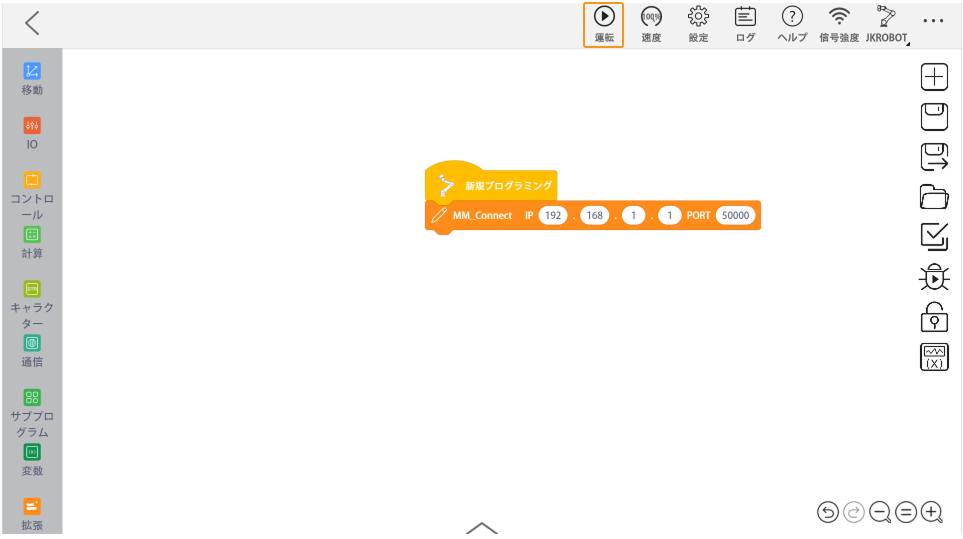
-
接続に成功すると、Mech-Visionのログバーの コンソール タブに関連するメッセージが表示されます。
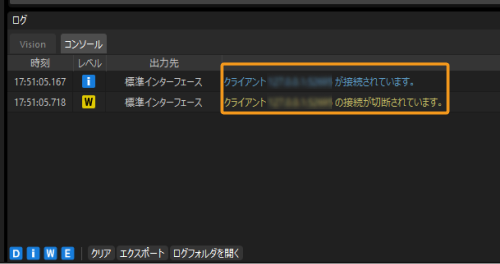
通信テストが成功した後、後続の作業をスムーズに進めるために、DHパラメータを設定してください。
DHパラメータを設定
各協働ロボットの実際のDHパラメータは理論値と差異があるため、Mech-Viz内の仮想ロボットは関節角度を同期した後でも、実際のフランジの位置姿勢とずれが生じます。高精度が求められるシーンでは、以下の手順に従ってDHパラメータを設定し、誤差を低減してください。
-
Mech-Vizソフトウェアを起動し、新規で空のプロジェクトを作成します。ロボットブランド には使用しているJAKAロボットを選択してください。
-
ホーム画面で、左上のロゴアイコンを10回クリックし、パスワード(デフォルトはJAKAAMAZING)を入力すると、以下の画面が表示されます。
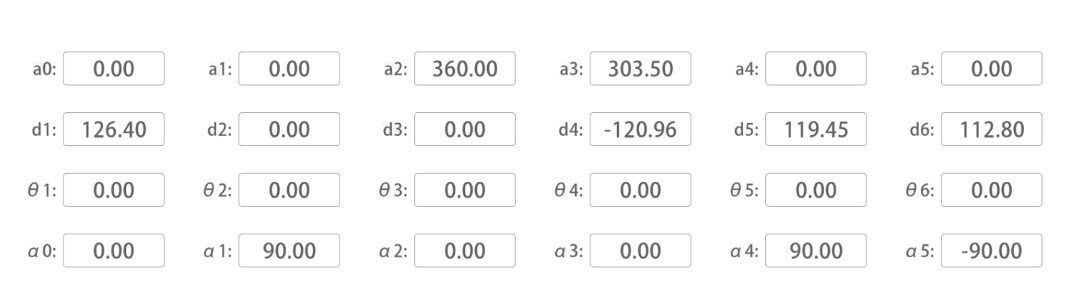
-
Mech-Vizソフトウェア左側のウィンドウでロボット名を右クリックし、ロボットファイルディレクトリを開く を選択し、
xxxx_algo.jsonファイルを開きます。 -
上図の [d1, a2, a3, d4, d5, d6] の値を、それぞれ
xxxx_algo.jsonファイル内のdhフィールドに入力し、ファイルを保存して閉じます。 -
Mech-Vizソフトウェア左側のウィンドウでロボット名を右クリックし、ロボットを再度読み込む を選択します。
xxxx_algo.jsonファイル内の shoulder_offset(肩部オフセット)および elbow_offset(肘部オフセット)の値は調整できないため、ロボットの動作にはある程度の誤差が残ることがあります。