Robot Selection
This section describes how to select a robot model.
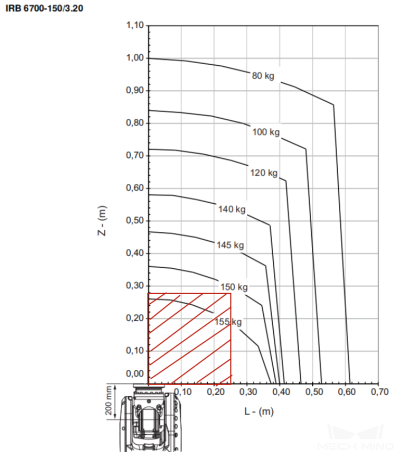
Verify Robot Payload
When verifying the payload of the robot, the weights of the end tool, the target object, and the pipeline should be considered comprehensively, and the correlation between the center of gravity and torque of the robot J6 flange should comply with the diagram of the payload.
Check Robot Reachability
There are many ways to check the reachability of the robot, such as via Mech-Viz, CAD file, Robcad, and RobotStudio.
As shown in the following figure, you can use Mech-Viz to check the robot reachability.
Select Robot Degrees of Freedom
The following will introduce the precautions when selecting the degrees of freedom of a robot, using single-case sack depalletizing and lid-free turnover box depalletizing as examples.
Single-Case Sack Depalletizing
| No. | Precaution | Illustration |
|---|---|---|
1 |
The possible placement of incoming sacks should be thoroughly considered. As shown in the figure, it is recommended to select a six-axis robot when the sacks are tilted with pitch and roll angles. |
|
2 |
Considering the requirements of subsequent processes, after opening the sacks, the robot should rotate to multiple postures to complete unloading (as shown in the figure). It is recommended to select a six-axis robot. |
|


Lid-Free Turnover Box Depalletizing
| No. | Precaution | Illustration |
|---|---|---|
1 |
Due to the inconsistent levelness of the tray or tray placement surface, incoming turnover boxes may be tilted. Four-axis robots cannot meet the requirements and are not recommended. |
|
2 |
When multiple boxes are picked at once, the upper surface of the turnover boxes will tilt at an angle as shown in the figure. Four-axis robots cannot meet the requirements and are not recommended. |
|


Communication Mode Selection
The selected robot model needs to be able to communicate properly with the vision system.
-
If you use the Standard Interface communication, you need to confirm that the selected robot brand and model support Standard Interface communication with the vision system, and that the robot controller meets the software and hardware requirements. For more information, see Standard Interface Communication .
-
If you use the Master-Control communication, you need to confirm that the selected robot brand and model support Master-Control communication with the vision system, and that the robot controller meets the software and hardware requirements. For more information, see Master-Control Communication .