General Parameters of Skills¶
General Parameters of Move Skills¶
Hint
Please click on the parameter names below for details.
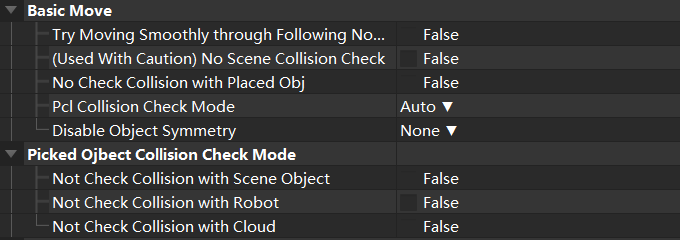
- Try Moving Smoothly through Following Non-Moves
Falseby default. If set toTrue, when executing the task, the program continues without waiting for the current move task to finish, thus avoiding robot halting and ensuring smoothness of operation.- (Use with Caution) No Scene Collision Check
Falseby default. If set toTrue, when executing the task, the program will not check whether the robot will collide with other objects in the scene and potential damages or injuries may occur. It is recommended to keep the parameterFalse. If it is determined that the robot may have collisions with other objects in the scene, it is forbidden to set the parameter toTrue.- No Collision Check with Placed Obj
Falseby default. If set toTrue, when executing the task, the program will not check whether there will be collisions between the models of the placed object in the scene and the models of the robot and the end effector. The parameter is usually set toTruefor Movement Tasks after Placing to avoid false collision error alarms due to normal object model overlaps.- PCL Collision Check Mode
Autoby default. For move tasks before the robot picks an object, please set it toNotCheck; for move tasks after the picking, please set toCheck. In other cases, normally, this parameter can be kept as default.- Disable Object Symmetry
- Please set based on the project. This parameter is only effective for move tasks with object pose as the input parameter, such as the move tasks and pallet tasks with Move Target Types set to
Obj Pose. This parameter is not effective for move tasks with Move Target Types set toTCP PoseorJps.If set toTrue, the robot will strictly place the picked objects based on object poses. - Not Check Collision with Scene Object & Not Check Collision with Robot
- If set to
True, when executing the task, the program will not check whether there will be collisions between the model of the picked object and the models of the scene objects and the robot to reduce the computation workload of the software and speed up the running, thus shortening the cycle time. This parameter is usually set toTruefor the one or two move tasks after picking. - Not Check Collision with Cloud
- If set to
True, when executing the task, the program will not check whether the model of the picked object will collide with the scene point cloud.1. Setting the parameter toTruecan help avoid false collision detection alarms.2. Setting the parameter toTruecan help reduce the computation workload of Mech-Viz and speed up the running, thus shortening the cycle time.
Basic Move General Parameters¶
Basic Move general parameters are for adjusting the speed and motion type of the robot’s move to a target point.
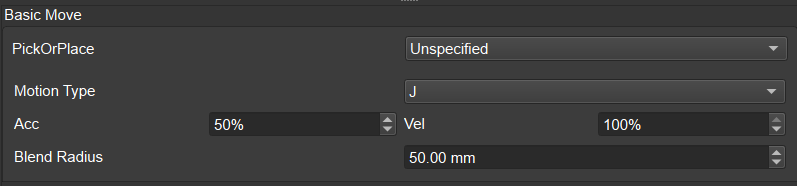
- Pick or Place
- The pick-or-place setting can be used for Mech-Viz project operation logic check. Please set the corresponding move task to
PickorPlacebased on the execution logic. - Motion Type
J, i.e., joint motion type is for scenarios where the robot can move within a relatively free spacce and the accuracy requirement for the robot’s move trajectory is not high.L, i.e., straight line motion type is for scenarios where the accuracy requirement for the robot’s move trajectory is high, such as welding, gluing, and some types of picking, etc.- Acc & Vel
- Please set the Acc (acceleration) and Vel (velocity) based on the requirements on cycle time, complexities of picking, etc.
- Blend Radius
- Blend radius is the radius of turning curves in the robot’s move trajectory. A higher blend radius means the robot runs more smoothly when making turns.If the robot moves in a relatively small space, please tune the Blend Radius to a smaller value. If the robot moves in a relatively large space without obstacles and two coonsequetive trajectory segments are far away, please tune the Blend Radius to a larger value.
- Move Target Type
- Move target usually should be set to
TCP PoseorJps. The optionObj Poseshould be considered only when placing an object.
- JPs Constraints
- The Jps constrains are not for controlling the robot to make shoulder/elbow/wrist flips, but for obtaining the optimal trajectory planning solutions that avoid shoulder/elbow/wrist flips as much as possible.

Other General Parameters¶
- Wait Move Precisely
- If set to
True, the set DO singnal will only be sent to the robot after the robot moves to a specified pose, and in practice the robot will halt for a little while between different move tasks.If set toFalse, when the robot is able to return a Move ID, or when the robot is not able to return a Move ID but Use Rough Move ID in Others is selected, the moves before and after this task will be executed without halt and the robot will move smoothly.
Note
During simulation, if some non-move tasks, such as branch_by_service_message, wait_di, etc., which need to receive external signals, can not be executed onward, please adjust the following two parameters when trasitioning from real execution to simulation for debugging.
- Skip Execution
- None: default, never skip the task.WhenSimu: skip the task only during simulation; the out port is specified by Out Port When Skip.Always: always skip the task, whether it is during simulation or actual execution; the out port is specified by Out Port When Skip.
- Out Port When Skip
- This parameter is effective when Skip Execution is set to
WhenSimuorAlyways. It sets the out port when skipping a task.