Create Your First Project
Software User Manuals
Robot Integrations
Application
Appendix
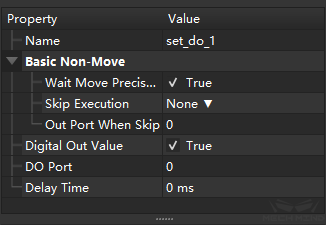
Set the specified DO port signal of the robot
See Other General Parameters
Set value of the robot digital output port, if it is checked as True, the value is 1, otherwise the value is 0.
The digital output port number of Robot
Change the DO value after the setting time