 wait_di¶
wait_di¶
Parameters¶
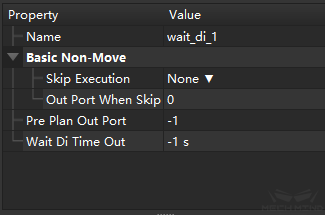
- BasicNonMove
- waitdi_timeout
Setting of pending for DI timeout. The default value is -1. When it is -1, it will keep pending.
- prePlanOutPort
Pre-planned output port.
Setting basis: the default value is -1. If the value is -1, the plan will be interrupted, that is, two relative tasks before and after this task cannot be planed together
If the plan shall not be interrupted, write 0 when the task output from left port in most cases, otherwise write 1.