 check_di¶
check_di¶
Description¶
Detect the signal value of the specified DI port of the robot. There are two output ports, if the value is 0, this task will output from left port, otherwise from right port.
Parameters¶
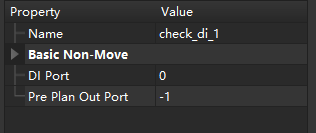
- BasicNonMove
- port
DI port of the robot to be checked
- prePlanOutPort
Pre-planned output port
Setting basis: the default value is -1. If the value is -1, the plan will be interrupted, that is, two relative tasks before and after this task cannot be planed together
If the plan shall not be interrupted, write 0 when the task output from left port in most cases, otherwise write 1.