 check_di_list¶
check_di_list¶
Description¶

Check if the signal values of multiple DI ports of the robot are same as the setting values. If all values are as expected, this task will output from left port, otherwise from right port.
Parameters¶
- BasicNonMove
- ioMappingConfigPath
Using with the From Task is checked
- From Task
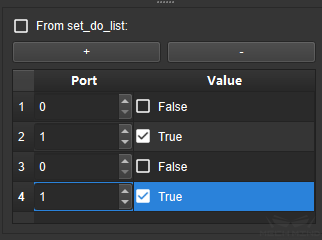
If it is unchecked, add the port and corresponding value to be checked
If it is checked, select set_do_list which need to be checked and the json file corresponding to ioMappingConfigPath
Application:Check if all the DO port are enabled as expected when using set_do_list control multiple suction cups.
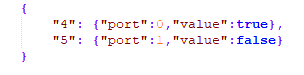
json file format:
Note:
By checking the port value of the selected set_do_list , find the real corresponding port to be checked in the json file and check whether the value is correct.
As shown in the picture, 4, 5 are the ports set for the selected set_do_list , Port 4 is mapped to DI port 0, and port 5 is mapped to DI port 1. Then check if the value of port 0 is true and the value of port 1 is false.
If a port in the selected set_do_list is not correspondingly found in the json file, an exception occurs.