Connect the Whole System¶
After mounting the camera and setting up the robot, you need to connect them to the IPC.
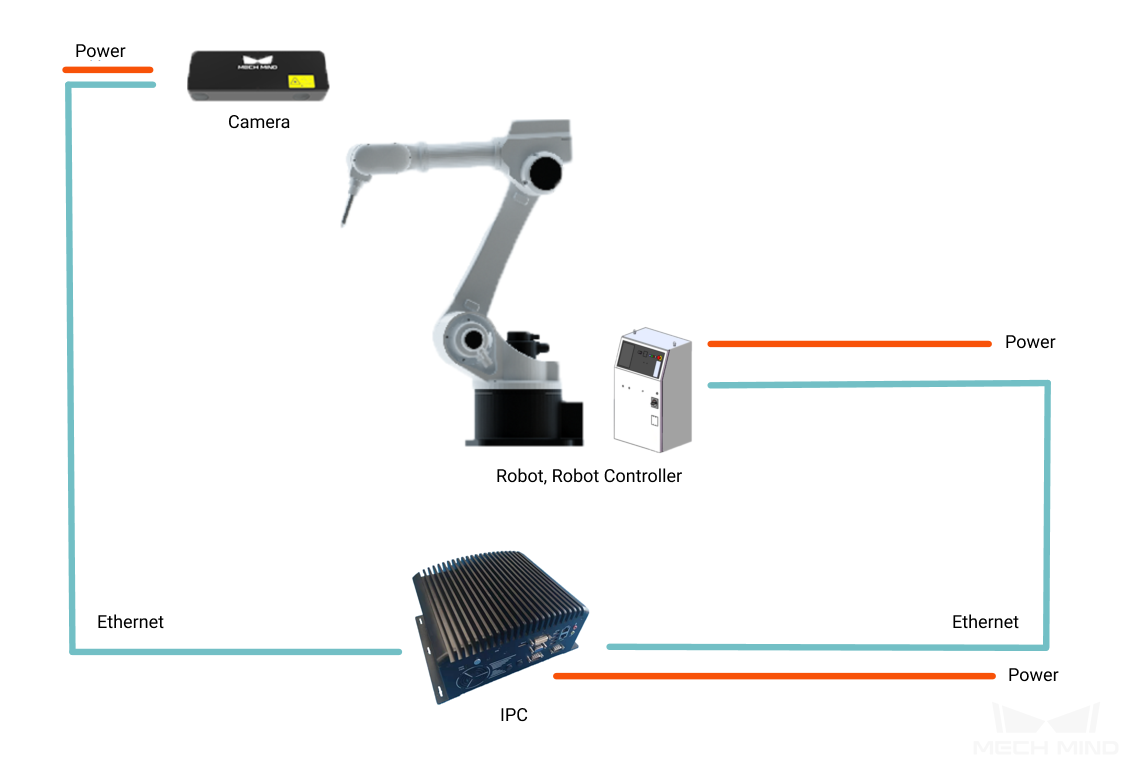
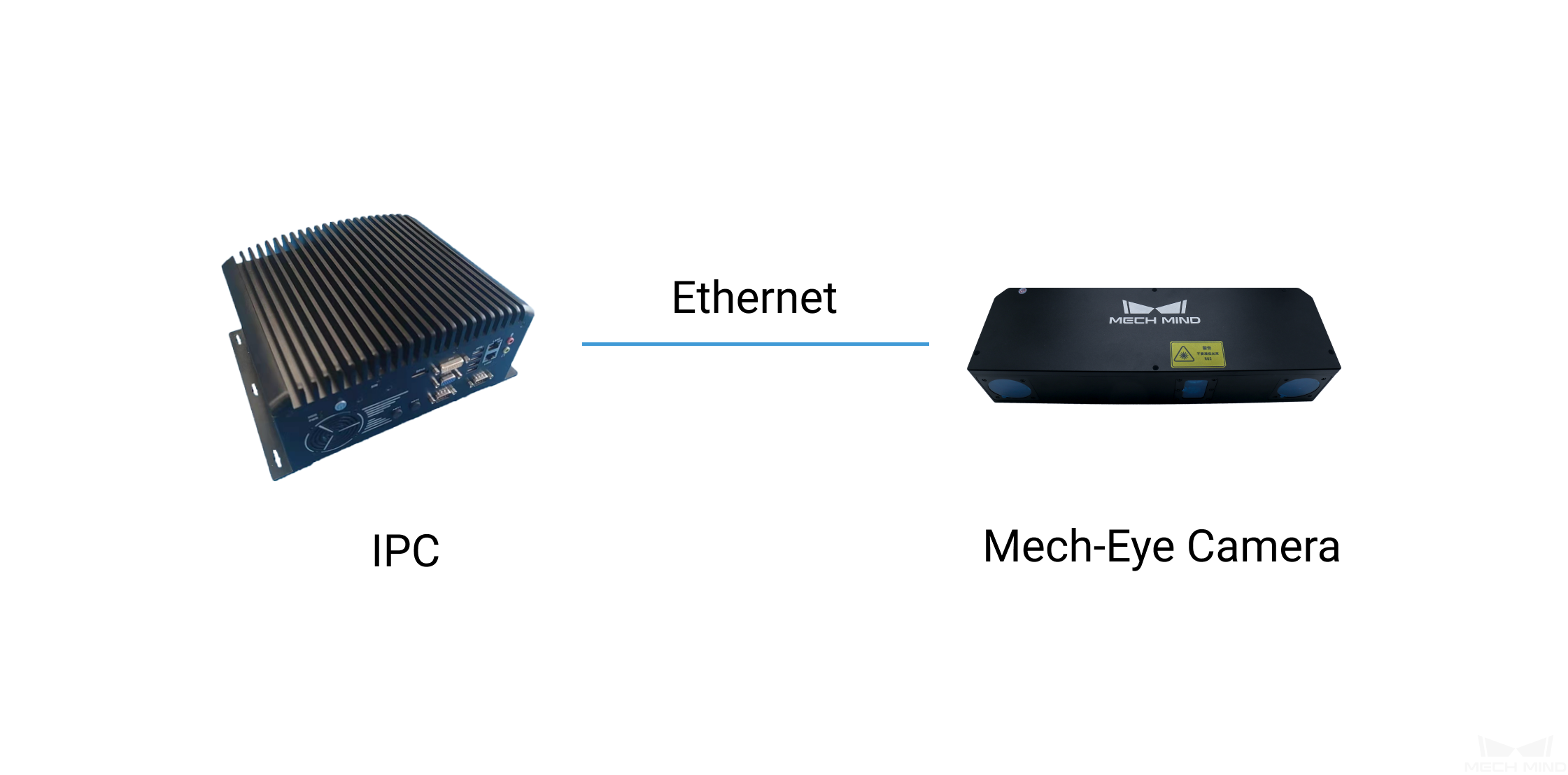
Connect the Camera and the IPC¶
Use the power cable and Ethernet cables provided by Mech-Mind Robotics to connect the Camera and IPC. An IPC may have multiple network interfaces, you can choose either one to connect. After connecting, you can change the subnetwork of the correspponding network interface according to actual needs.
Connect the Robot and the IPC¶
Use a Ethernet cable to connect the Robot Controller and IPC . After completing the connection, please turn on the robot controller and the robot teach pendant.
Attention
Please pay attention to which Ethernet port on the robot controller should be used. See Robot Integrations for detailed information.
Please keep the cables organized. It is dangerous if the cables get tangled up with the robot.
IP address Setup and Program Loading¶
In this project, the IPC should be connected with both the robot and camera, and therefore two IP addresses are needed. You can select the network interface and subnetwork according to actual needs. Please make sure that the IP address of connected devices and the IP address of IPC belong to the same subnetwork.
In this project, the IP address of the network interface that connects robot to the IPC is 192.168.2.222.
The IP address of the network interface that connects camera to the IPC is 192.168.2.66.
In this project, an UR robot is used, which can be controlled without loading a full-control program onto the robot. If the robot model you are using needs to load the full-control program, please refer to Robot Integrations.
Now you have completed connecting the whole hardware system. Please check the circuirt and power on. Then please read on to configure the software on the IPC.