set_do_list¶
set_do_list¶
Description¶
Set the multiple specified DO ports signal of the robot
This module is used to control multiple digital outputs at the same time. There are two application scenes:
Constantly enable control several suckers at the same time, the port number can be defined by the user directly on the interface
Use individually controllable combined suckers, which require a sucker offset when grasping, or when grasping multiple boxes at one time, the visual_move provides the port number that needs to be controlled for opening
Parameters¶
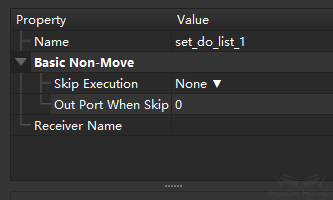
- BasicNonMove
- receiverName
if the adapter is required to send the set DO status to an external device, enter the service name registered by the adapter on the Mech-Center to receive the IO status
- From Task:
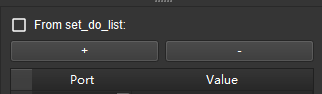
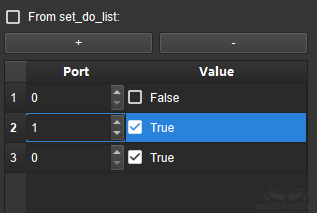
When the DO port to be opened at the same time is fixed, it is unnecessary to check From Task. Add or delete the number of DO by + or - , and then change the corresponding port number and value, as shown in the figure below
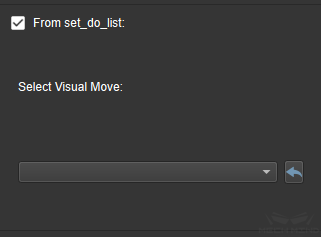
When using visual_move and using the offset strategy or multipick strategy, the DO port to be opened each time is not fixed, which is provided by visual_move . At this time, check From Task , as shown in the figure below, and elect the corresponding visual_move name below.