Others¶
Operation Settings¶
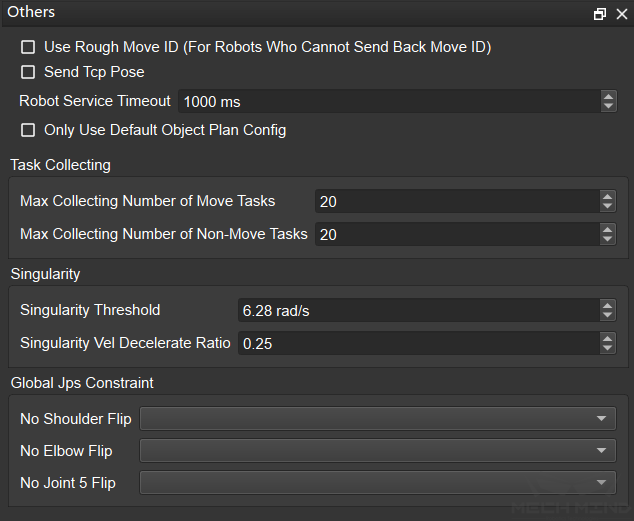
Use Rough Move ID(For Robots Who Cannot Send Back Move ID):Calculate the rough move Id for the robot that cannot send move Id. The function is to know as accurately as possible whether the sent move is completed, so as to make the move transmission as continuous as possible, so that the robot movement is smoother. It is turned on by default, but currently this function is not stable. There may be problems in actual use. You can turn off this option when problems occur.
Send TCP Pose:Switch whether the pose sent by Mech-Viz is JPS or TCP Pose.
Robot Service Timeout :The robot service timeout period. Except for moving, all other timeout periods for communicating with the robot, such as set_do , check_di etc.
Only Use Default Object Plan Config:After it is turned on, even if there are multiple object lables, the symmetry of the default object is still used.
Task Collecting¶
Max Collecting Number of Move Tasks & Non-Move Tasks:On the one hand, it prevents Mech-Viz from sending too many points after falling into an infinite loop, and on the other hand, it limits the number of commands Mech-Viz sends each time.
Singularity¶
Singularity Threshold:During path planning, it determines whether the threshold of the singular point is reached (maximum angular velocity of joints in radian system), generally the default is sufficient. If some robots are more sensitive to singularity detection (shown as: the software simulation path is normal, but the real robot follows the same path but reports the singularity error), the value can be appropriately reduced.
Singularity Vel Decelerate Ratio :When a singularity occurs and the speed reduction ratio is not lower than this value, it is considered that the singularity can be solved by speed reduction. Reducing this value can reduce the probability of software planning failure due to “severe singularity”.
Global Jps Constraint¶
No Shoulder Flip/NO Elbow Flip/No Joint 5 Flip :You can choose when holding an object or the whole execution process to reduce unnecessary turning of the robot.
However, setting the shoulder/elbow/Joint 5 to “not turn” is not necessarily the best choice. Examples are as follows:
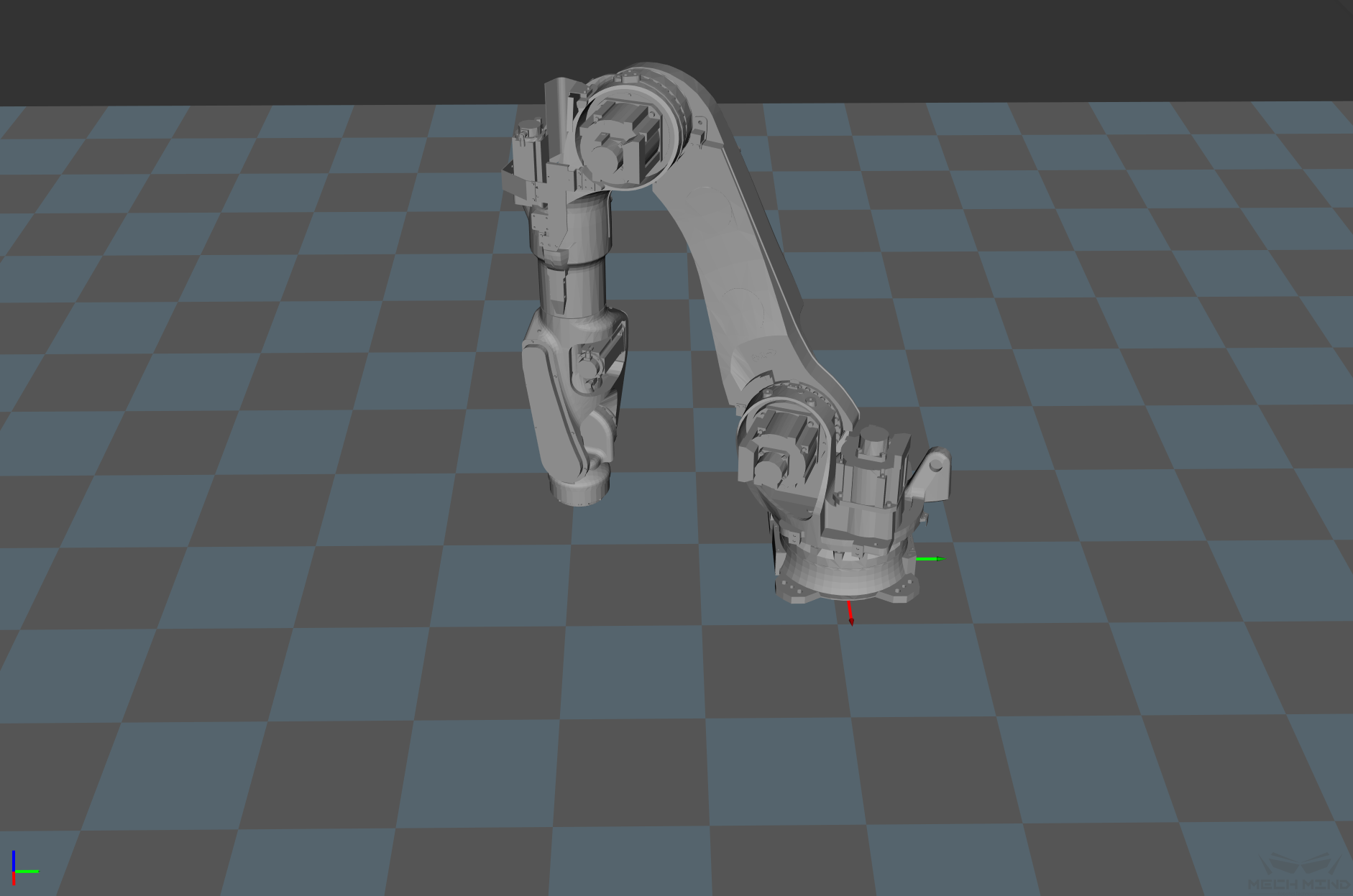
If there is the above posture during the movement, it is known that the robot Joint 5 flip/shoulder flip/elbow flip is the relationship between the axes. If the wrist flip is forcibly specified, it may cause the robot to turn more. Therefore, you should only specify No Shoulder Flip and No Elbow Flip.
Note
The priority of JPs Constraints for movement tasks is higher than the global settings here. If there is no setting in movement tasks, the global settings will take effect.