Plan History¶
The Plan History window expands the planning information and error description at runtime to help to debug, as shown in the following screenshot:
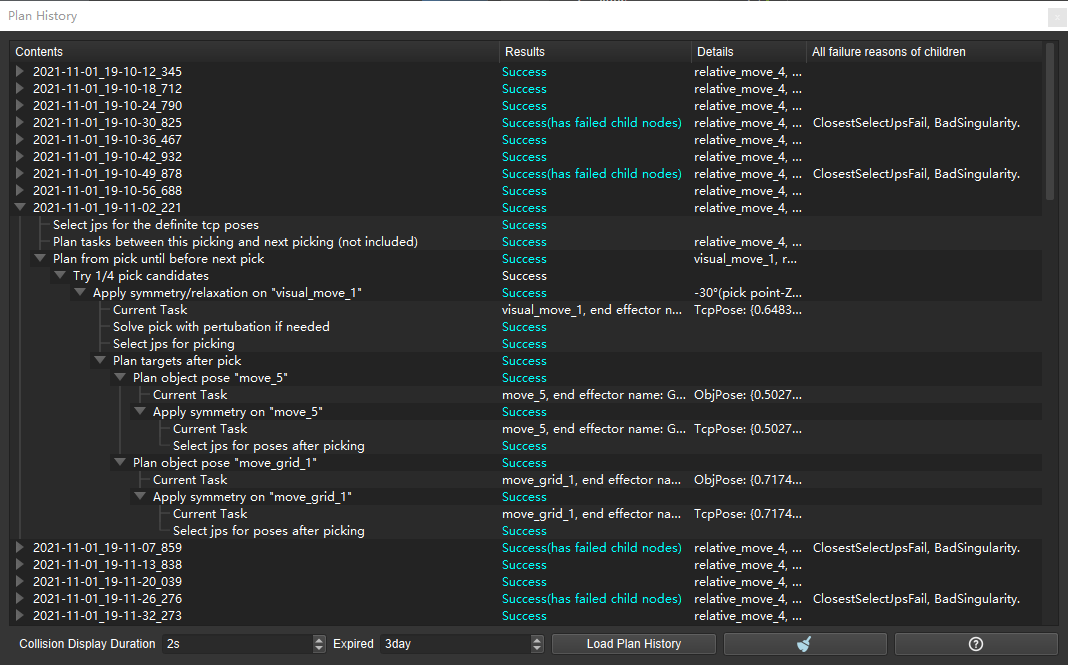
Contents: Show planning history of a specific time. After expansion, the planning content will be displayed in a hierarchy.
Graphical notices of collision results in planning history:
Scene collision
Click the name of the task where the collision occurred to highlight all colliding objects.
Click on the colliding object to highlight itself.
Point cloud collision
Click the task where the collision occurred to highlight all colliding objects.
Click on the volume of collision, the point cloud where the collision occurred will be highlighted.
If no contact point is recorded for the point cloud collision, only another object in the collision (robot, end effector, or the picked object) will be highlighted.
Collision of an object to pick
When the collision occurred on an object to pick, the notice of collision is shown on the object.
Results: Show whether the plan is successful or not. If it fails, it is displayed in red. The item of failure under Contents can be expanded to view the details.
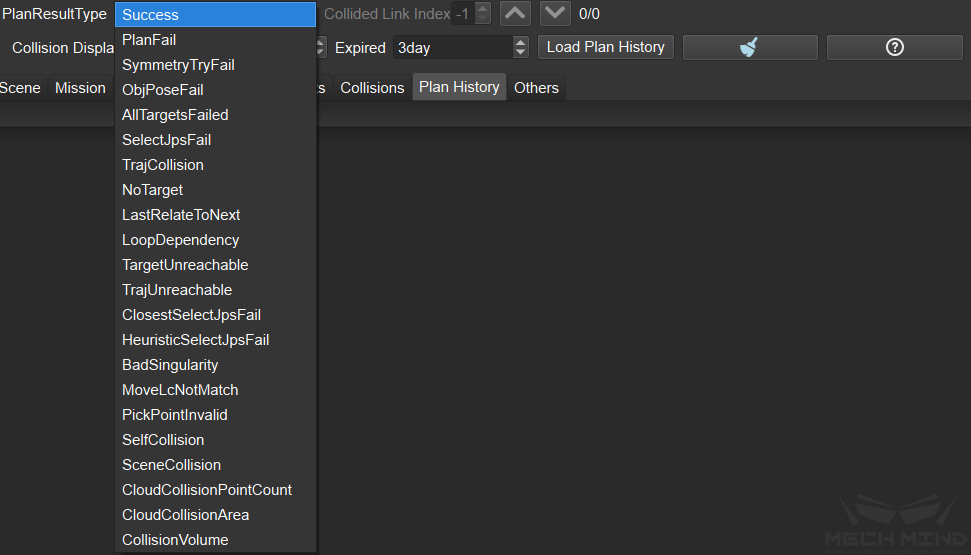
Select an item under Contents, press Ctrl+F to view the possible plan result types, as shown in the screenshot below.
At the bottom of the window, the collision display duration, the time to expiration can be set, the plan history can be loaded, and the content of planning can be cleared, as shown in the screenshot below.
