対象物検出モジュールの使用例
本節では、ローターのデータセット( クリックでダウンロード)を提供し、対象物検出の使用方法を説明します。この例では、全てのローターの位置を検出し、さらにローターの数を取得します。
| また、お手元のデータも使用できます。ラベル付けの段階に多少異なりますが、全体の操作はほぼ同じです。 |
使用手順
-
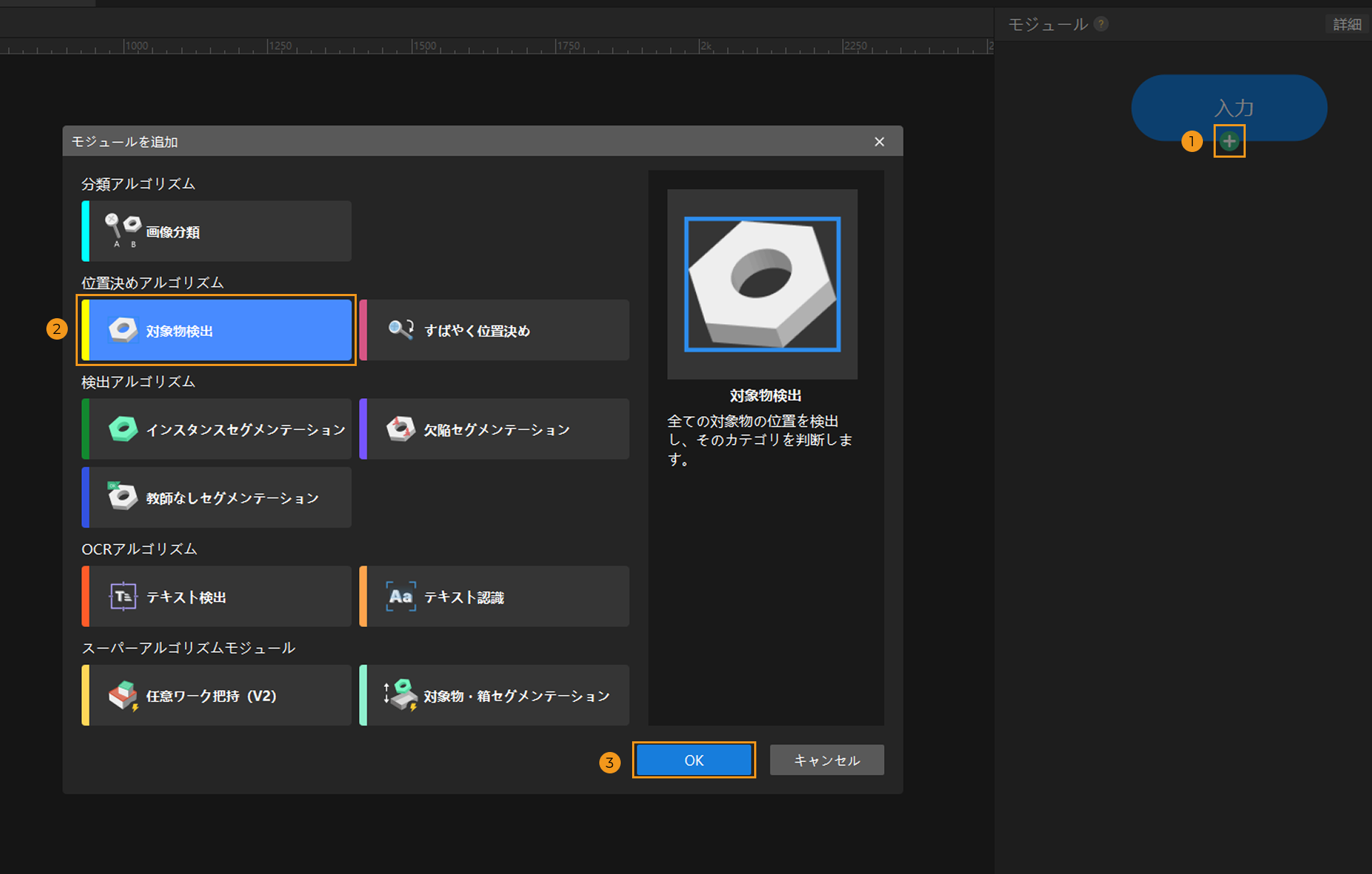
プロジェクトを新規作成して対象物検出モジュールを追加:Mech-DLK を起動し、ホーム画面のプロジェクトを新規作成をクリックします。保存パスを選択し、プロジェクト名を入力して新しいプロジェクトを作成します。メイン画面の右上にあるモジュールバーで、入力モジュール下の + ボタンをクリックし、モジュール追加ウィンドウで対象物検出モジュールを選択します。
-
画像をインポート:取得した画像データをインポートするか、前述のデータ圧縮ファイルを解凍して使用します。以下の方法で画像をインポートしてください。
-
方法 1
画像またはフォルダを画像リストにドラッグします。ドラッグによるデータセットのインポートには対応していません。
-
方法 2
画像リストの上のインポート/エクスポートボタンをクリックします。データの種類に応じてインポートオプションを選択します。
-
前のモジュールからインポート:前のモジュールの画像をインポートします。
-
画像をインポート:一枚または複数枚の画像をインポートします。
-
フォルダをインポート:フォルダにある全ての画像をインポートします(サブフォルダー内の画像を除く)。
-
データセットをインポート:Mech-DLK からエクスポートしたDLKDB 形式(.dlkd)と COCO 形式のデータセットをインポートします(クリックしてサンプルデータセットをダウンロード)。
-
-
-
ROI 設定:ROI ツールのアイコン
 をクリックして、画像からローターが配置された部品箱を ROI として指定します。その後、ROI 枠の右下にある確定アイコン
をクリックして、画像からローターが配置された部品箱を ROI として指定します。その後、ROI 枠の右下にある確定アイコン  をクリックして適用します。これは、不要な背景の情報による干渉を減少するためです。
をクリックして適用します。これは、不要な背景の情報による干渉を減少するためです。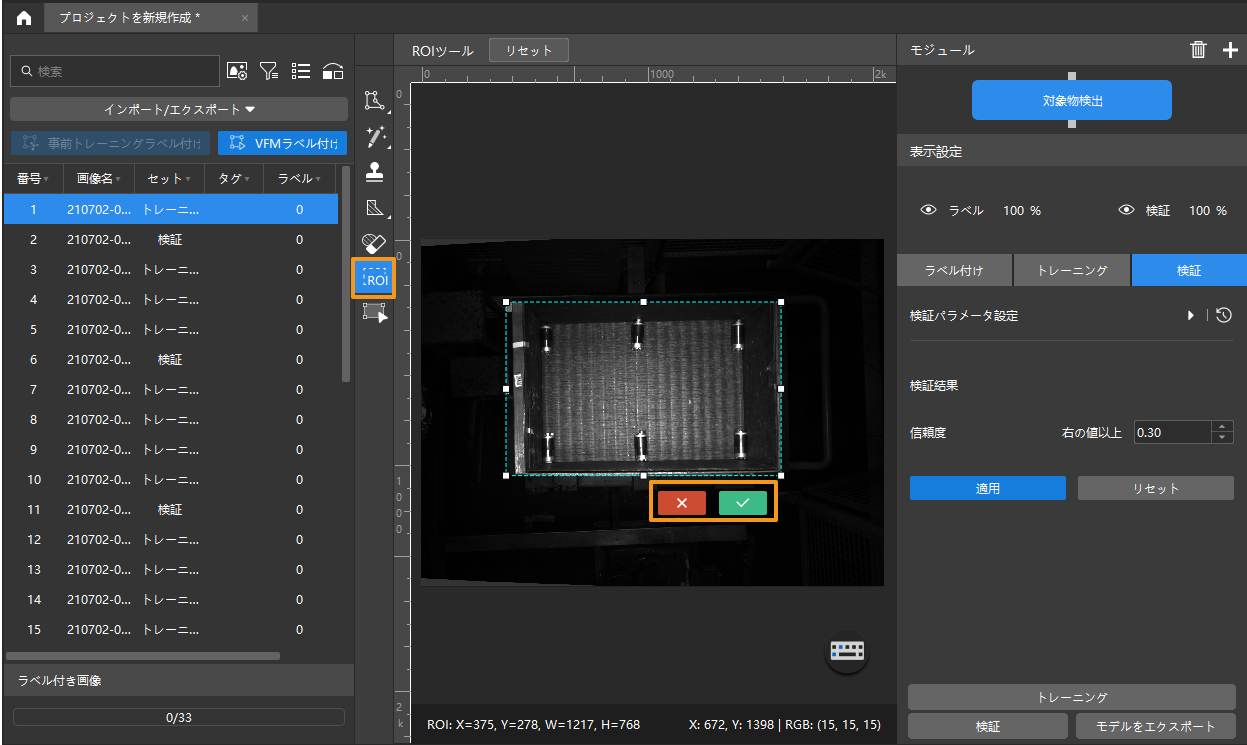
-
トレーニングセットと検証セットの振り分け:ソフトウェアはデフォルトでデータセットの 80% をトレーニングセットに、20% を検証セットに分けます。トレーニングセット/検証セット分割アイコン
 をクリックしてスライダーをドラッグすることで比率を調整できます。トレーニングセットも検証セットもすべてのカテゴリーの対象物の画像が含まれることを確認してください。そうでなければ画像の名前を右クリックしてトレーニングセットに移動あるいは検証セットに移動をクリックして画像のカテゴリーを変更することができます。
をクリックしてスライダーをドラッグすることで比率を調整できます。トレーニングセットも検証セットもすべてのカテゴリーの対象物の画像が含まれることを確認してください。そうでなければ画像の名前を右クリックしてトレーニングセットに移動あるいは検証セットに移動をクリックして画像のカテゴリーを変更することができます。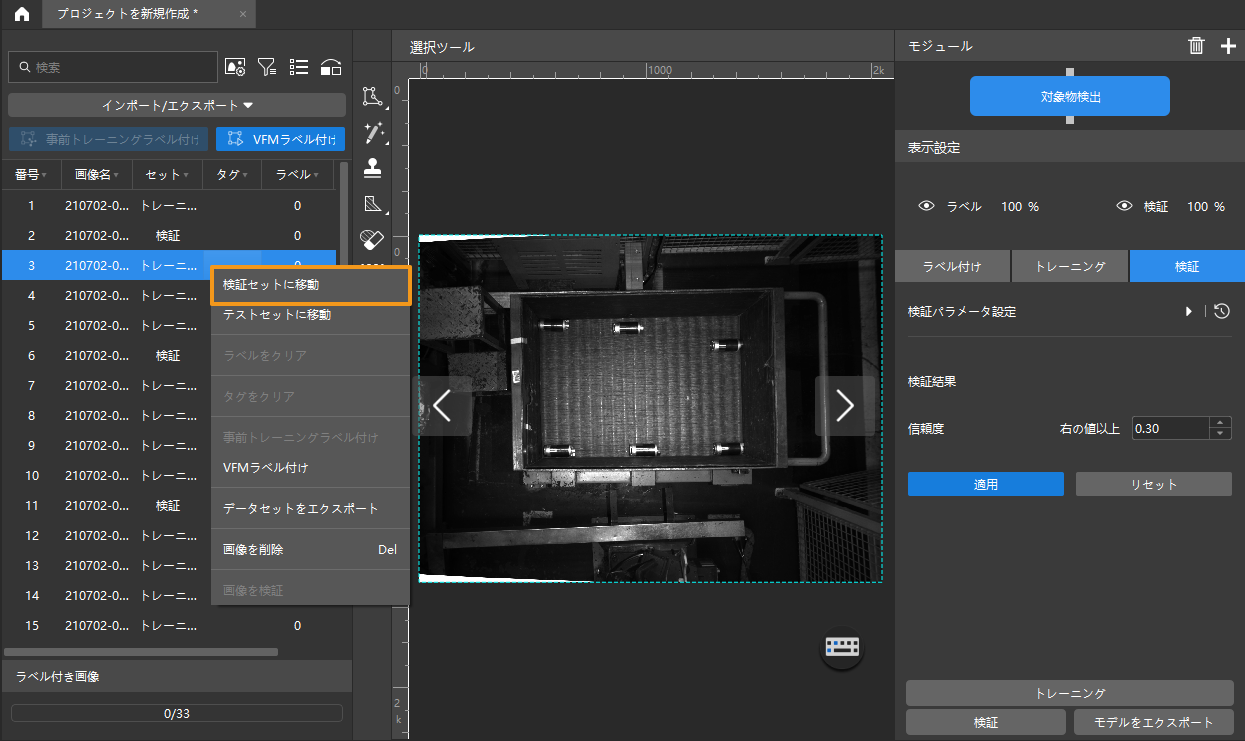
-
クラスを作成:対象物の名前または特徴によってクラスを作成します。このデータセットに対し、ローターの英語名で作成を作成します。
クラスを右クリックして右へマージを選択してデータを別のクラスに変更することができます。モデルをトレーニングしてからクラスをマージした場合に、モデルを再度トレーニングしてください。 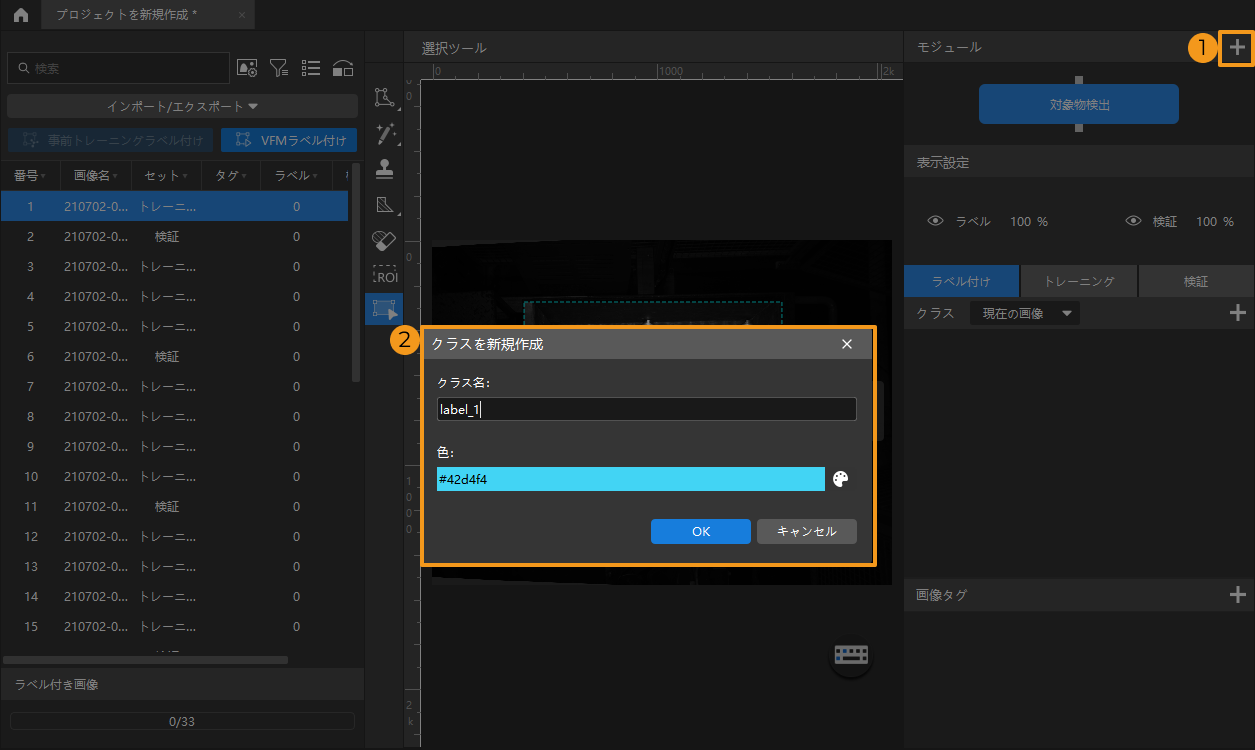
-
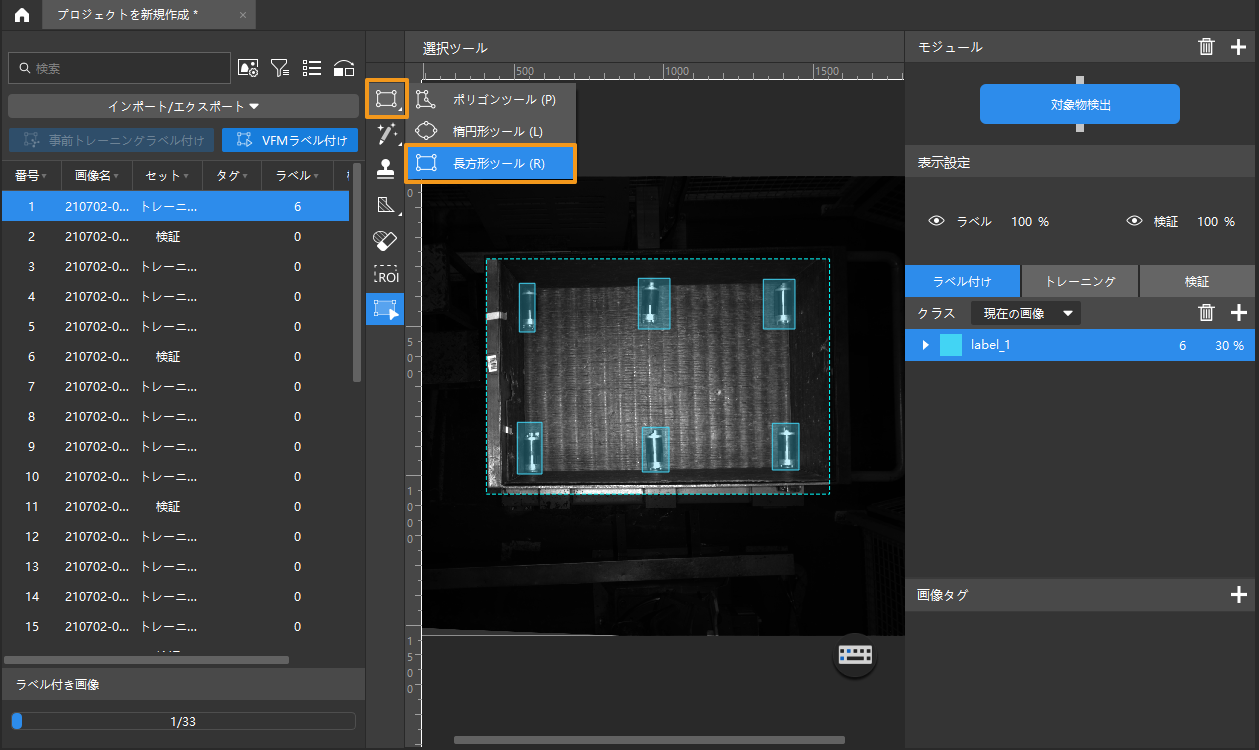
画像のラベル付け:長方形ツールで画像内すべてのローターにラベルを付けます。その際、ローター以外の領域を避けて長方形の枠がぴったりとローターのエッジに沿うようにしてください。正しくないラベル付けはモデルトレーニングの効果に影響を与えます。クリック してラベル付けのツールについての説明を確認します。
-
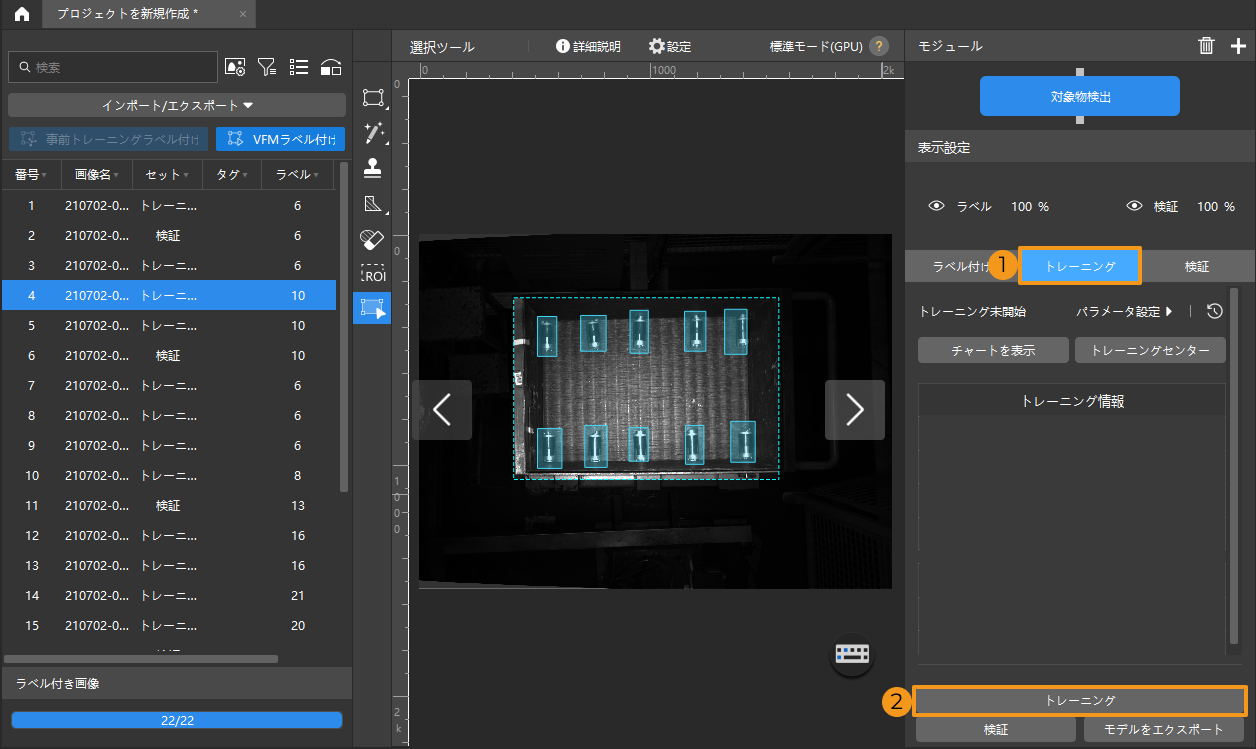
モデルトレーニング:デフォルトのパラメータを使って、トレーニング をクリックすればモデルのトレーニングを開始します。
-
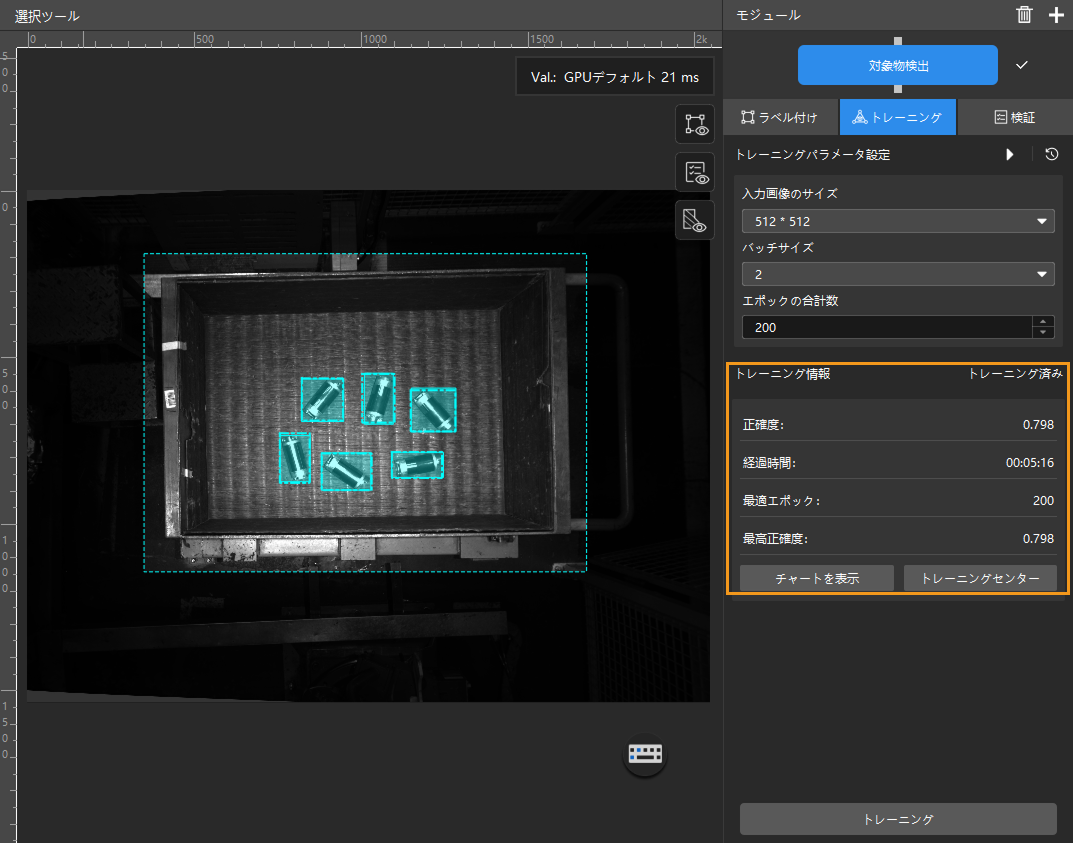
トレーニング状況確認:トレーニングタブからモデルのトレーニング状況をリアルタイムで確認できます。
-
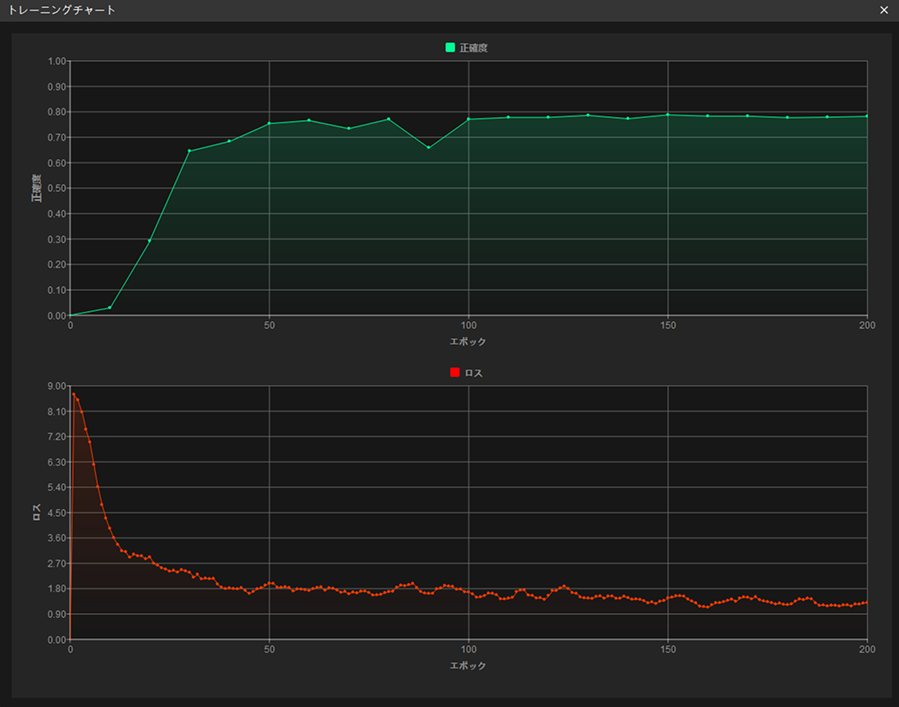
「トレーニングチャート」から状況確認:トレーニングタブのチャートを表示ボタンをクリックしてトレーニングチャートを表示して、曲線の変化から精度の推移を把握します。正確度曲線が全体的に上昇傾向、損失曲線が全体的に低下傾向になると、トレーニングが正常に進行していることになります。
-
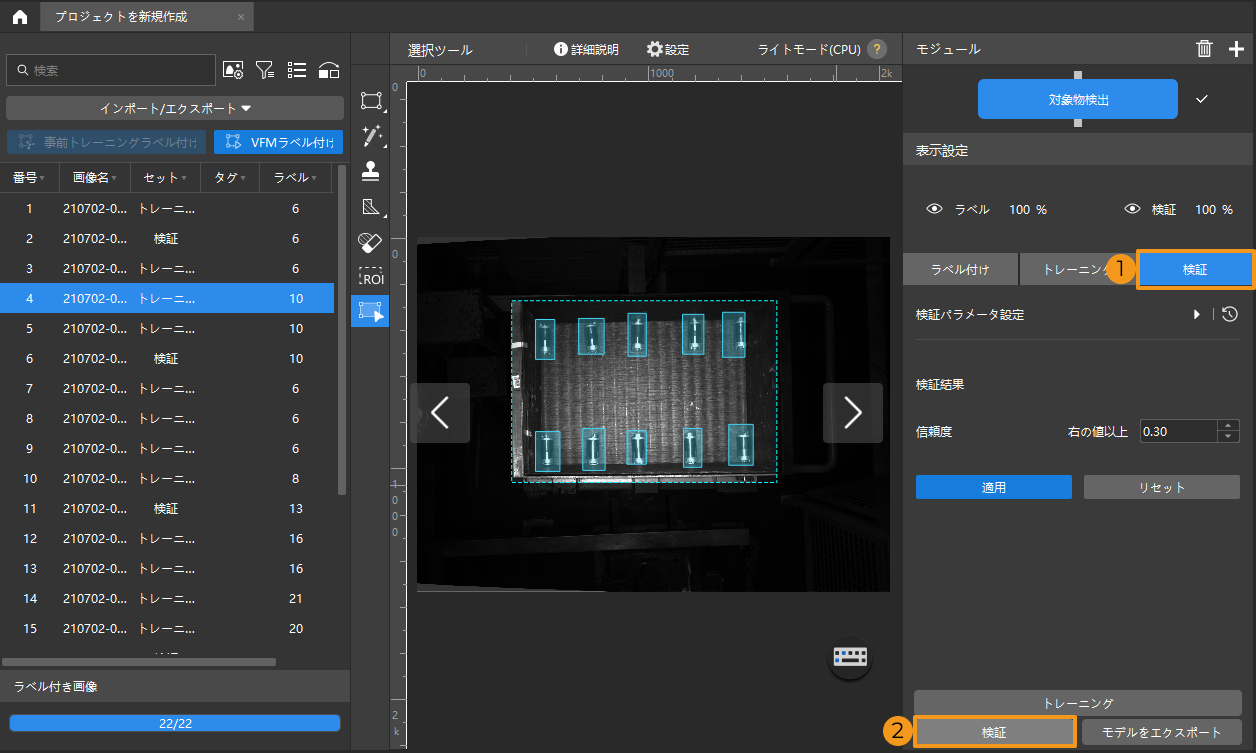
モデル検証:モデルトレーニング終了後、検証 をクリックして結果を確認します。
モデルを検証した後、新しい画像をモジュールにインポートして事前トレーニングラベル付け機能を使用して自動ラベル付けを実行できます。詳細については、事前トレーニングラベル付け機能をご参照ください。
-
トレーニングセットのモデル検証結果を確認:検証終了後、検証タブの検証統計から検証の結果を確認できます。
-
詳細レポートをクリックして詳細レポートウィンドウを開いて詳細な結果データを確認します。
-
レポートのラベル付け結果マッチングには、モデル推論(検証)の結果と手動ラベルとのマッチング関係を示します。
-
表の縦は手動で付けたラベル、横は推論の結果です。青いセルは両方が一致していることを示します。その他のセルは不一致が存在することを示しており、モデル最適化の参考になります。
-
セルのデータをクリックすると、ソフトウェアのメイン画面の画像リストに対応する画像のみが表示されます。
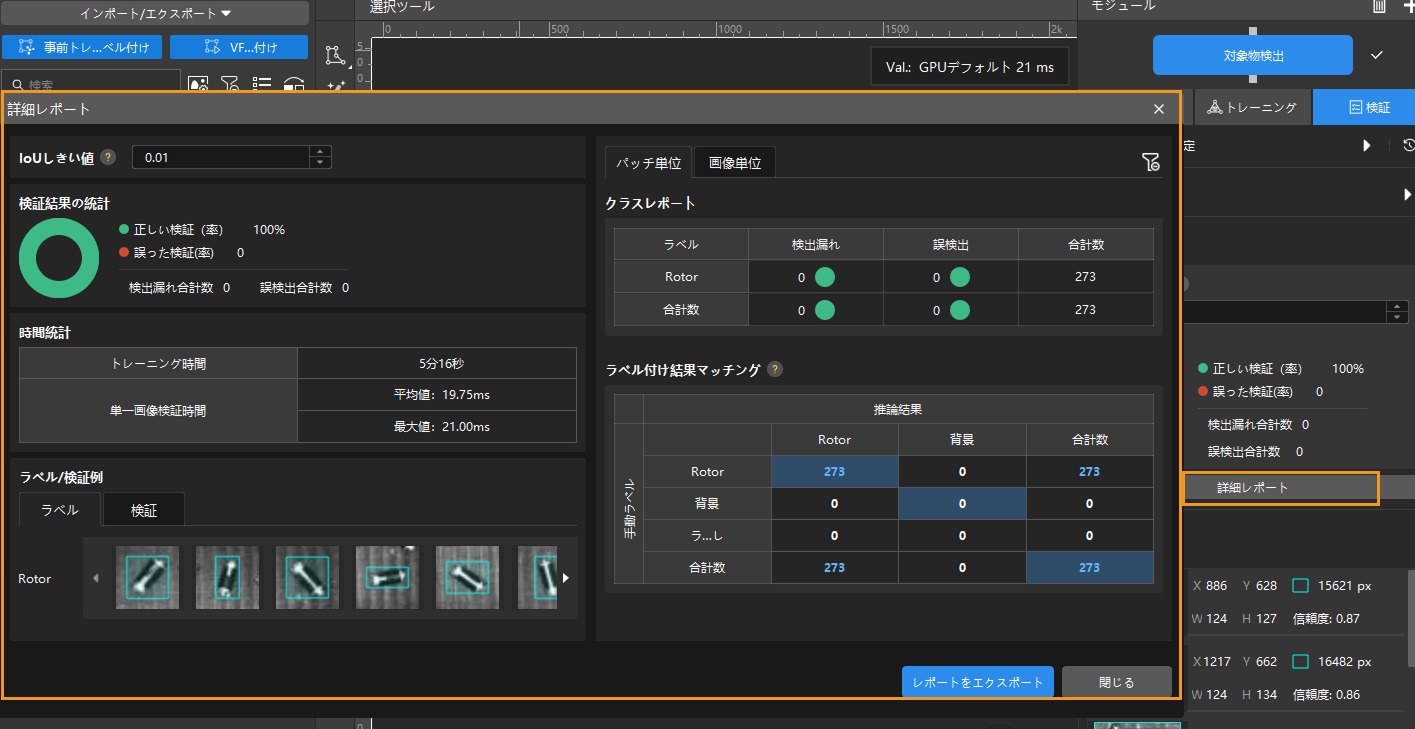
検証結果に見逃しや誤検出がある場合、トレーニング効果を改善する必要があります。ラベル付けをチェックしてトレーニングパラメータを調整してから再トレーニングを行ってください。 詳細レポートウィンドウの右下にあるレポートをエクスポートボタンをクリックし、サムネイルレポートまたは完全画像レポートをエクスポートすることが選択できます。

テストセット内の見逃しや誤検出がある画像を全て手動的にラベル付けしてトレーニングセットに変更する必要はありません。一部の画像を追加でラベル付けして、トレーニングセットに追加しモデルを再トレーニング・検証します。残りの画像を検証のために使用されます。 -
-
再トレーニング:新たにラベル付けした画像をトレーニングセットに追加してから、トレーニングボタンをクリックして、再トレーニングを開始します。
-
モデル検証結果の再チェック:再トレニンーグ終了後、再び検証ボタンをクリックしてモデルの検証を行い、各データセットにおけるモデルの検証結果を確認します。
-
モデルの微調整(オプション):開発者モードをオンにしてトレーニングパラメータ設定でモデルを微調整することが可能です。詳細な説明は、モデルの追加学習をご参照ください。
-
モデルの最適化:モデルが使用要件を満たすまで上記の手順を繰り返します。
-
モデルをエクスポート:モデルをエクスポートをクリックします。表示されたウィンドウで推論目標の最大数を設定し、保存場所をしてしてからモデルをエクスポートをクリックしてモデルをエクスポートします。
一回に推論を実行する目標の最大数。初期値は 100 です。 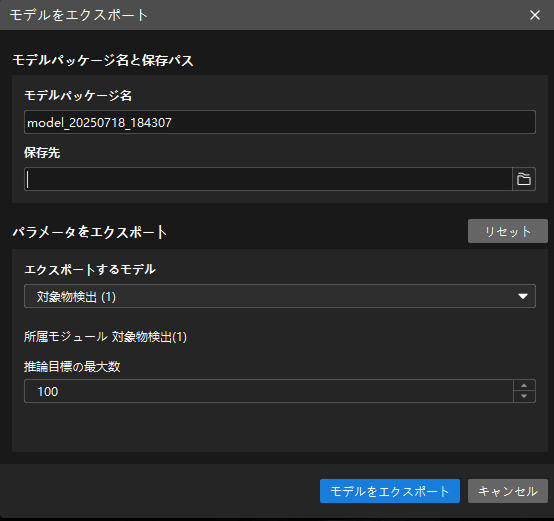
エクスポートされたモデルは Mech-Vision とMech-DLK SDK、Mech-MSR に使用できます。クリックして詳細な説明を確認します。