在 Mech-MSR 中配置 TCP ASCII 通信
梅卡曼德 3D 测量系统支持与外部设备进行 TCP ASCII 通信。
配置流程
要配置TCP ASCII通信,执行如下步骤:
-
在软件的工具栏中,单击通信配置;
-
单击 TCP ASCII 通信协议左侧的 ▶,展开相关设置;
-
根据需要设置端口参数。
端口参数的默认值为 5000。启用 TCP ASCII 通信服务后,软件将在指定的端口监听外部设备发送的TCP ASCII指令。
-
(可选)参考Return指令数据格式设置说明,设置Return指令数据格式参数。
Return指令数据格式参数用于定制软件对return指令的返回数据格式。
-
(可选)参考其他数据格式设置说明,设置其他数据格式。
-
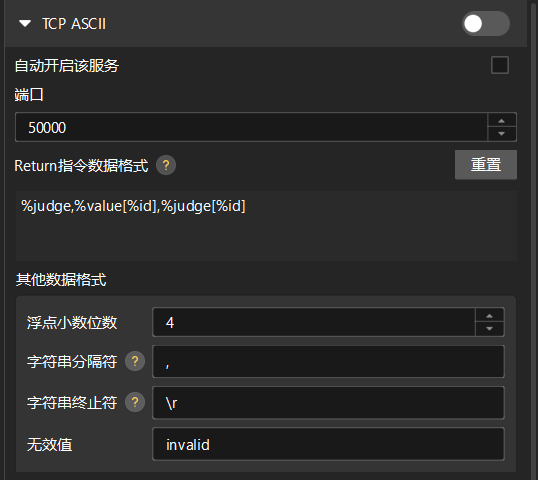
如需下次打开方案时,软件自动开启 TCP ASCII 通信服务,可勾选自动开启该服务选项。
|
设置return指令数据格式
外部设备发送return指令后,软件可根据设置的return指令数据格式返回结果。
支持的数据格式
return指令的返回数据支持如下字段,可根据需求组合。
| 字段 | 描述 |
|---|---|
|
表示图像采集时间,返回格式为 20200101010101100(2020年01月01日01时01分01秒100毫秒)。 |
|
工程的总体质量判定结果,返回 |
|
指定测量项的测量值。 例如, |
|
通信输出中已配置的所有测量项的测量值。 |
|
指定测量项的判定结果,返回 例如, |
|
通信输出中已配置的所有测量项的判定结果。 |
测量值与判定结果
测量项的测量值
只有满足如下条件,Mech-MSR才会向外部设备返回测量项的测量值:
-
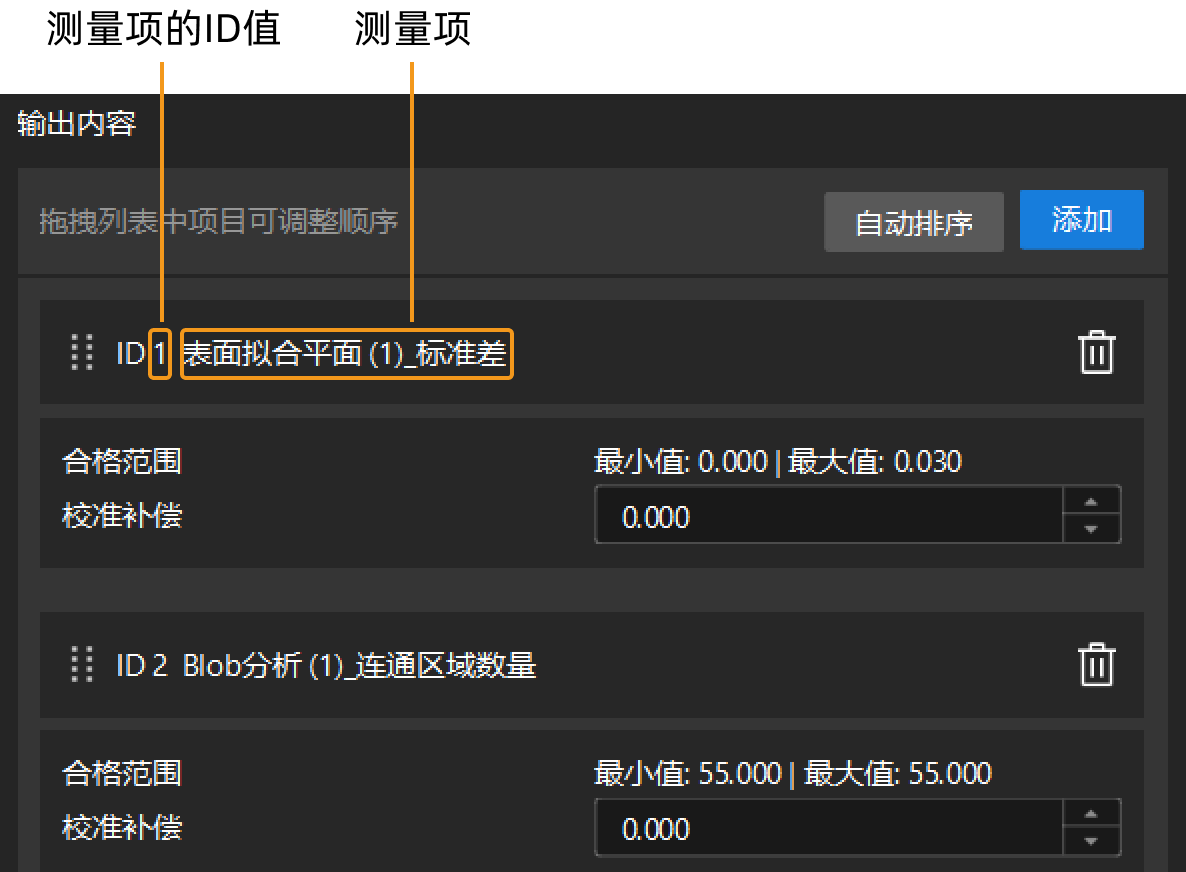
在Mech-MSR输出管理窗口的通信输出选项卡中,测量项已经添加到输出内容中。测量项的ID值从小到大的顺序即为返回结果的顺序。
-
在通信配置窗口,Return指令数据格式的值包含“%value[%id]”或“%value[测量项的ID值]”。
测量项的判定结果
测量项的判定结果,0表示OK,1表示NG。只有满足如下条件,Mech-MSR才会向外部设备返回测量项的判定结果:
-
在Mech-MSR输出管理窗口的通信输出选项卡中,该测量项已经添加到输出内容中。测量项的ID值从小到大的顺序即为返回结果的顺序。
-
在通信配置窗口,Return指令数据格式的值包含“%judge[%id]”或“%judge[测量项的ID值]”。
示例
假设通信输出中配置了三个测量项,ID分别为1、2和3。
| 示例 | 说明 | |
|---|---|---|
1 |
数据格式 |
%judge,%value[%id],%judge[%id] |
返回结果 |
0, 100, 0, 200, 0, 300, 0 |
|
映射关系 |
%judge, %value[1], %judge[1], %value[2], %judge[2], %value[3], %judge[3] |
|
2 |
数据格式 |
%judge, M%id, %value[%id], %judge[%id] |
返回结果 |
0, M1, 100, 0, M2, 200, 0, M3, 300, 0 |
|
映射关系 |
%judge, M1, %value[1], %judge[1], M2, %value[2], %judge[2], M3, %value[3], %judge[3] |
|
3 |
数据格式 |
%judge, V%value[%id], J%judge[%id] |
返回结果 |
0, V100, J0, V200, J0, V300, J0 |
|
映射关系 |
%judge, V%value[1], J%judge[1], V%value[2], J%judge[2], V%value[3], J%judge[3] |
|
| 示例2和3是添加字符前缀的示例。示例2中M%id会将输出字符M和测量项的ID拼接起来输出。示例3中V%value[%id]和J%judge[%id]会在输出的每个测量项的测量值和判定结果前加上字符V和J。 |
设置其他数据格式
你可以根据实际需求设置其他数据格式。
| 参数 | 说明 |
|---|---|
浮点小数位数 |
指定软件输出测量值时保留的小数位数。默认为4,可选范围为0~20。 |
字符串分隔符 |
指定TCP指令请求中数据间(指令名称与参数,以及参数与参数)的分隔字符。默认为英文逗号(,),常用分隔符有英文逗号和分号。 |
字符串终止符 |
指定指令的结束字符。默认为\r,常用终止符有\n、\r。 |
无效值 |
指定测量项无测量值或者无判定结果时的数据格式,默认值为invalid。 |