Mech-Visionのみを使用してビジョンポイントを送信
以下では、Mech-Visionのみを使用してしビジョンポイントを送信するAdapterサンプルプログラムについて詳しく説明します。
概要
本例は、クランクシャフト供給の応用シーンに適しています。カメラは箱の上方のスタンドに取り付けられ、Mech-Visionは画像を撮影して把持可能なワーク座標をロボット側に出力します。
本例では、Mech-Visionに組み込まれているサンプルプロジェクトを使用して説明します。
このプロジェクトは3Dモデルマッチングのアルゴリズムを使用し、異なるワークに対して異なるモデルファイルと把持位置姿勢を設定する必要があります。したがって、Mech-Visionでパラメータレシピを設定する必要があり、ロボット側から画像撮影コマンドを送信する際にレシピ番号(ワーク番号)を設定します。
通信ソリューション
ロボットは、TCP/IP Socketプロトコルを使用してMech-VisionとMech-VizソフトウェアがインストールされたIPCと通信します。通信フォーマットはASCII文字列で、英語のコンマ(,)をデータ区切りとして使用されます。
その中、ビジョンシステムはサーバーとして使用され、ロボットはクライアントとして使用されます。
通信のプロセスは下図に示します。
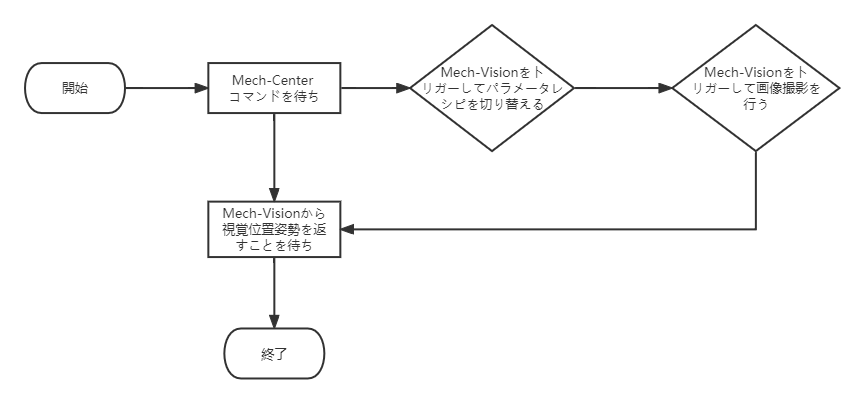
通信プロセスは、次のように詳細に説明されています。
-
Mech-Centerは、ロボットが画像撮影コマンド
Pとレシピ番号を送信するのを待ちます。 -
Mech-Centerは、Mech-Visionをトリガーしてパラメータレシピを切り替えます。
-
Mech-Centerは、Mech-Visionをトリガーして撮影します。
-
Mech-Visionが画像を撮影して認識に成功すると、ステータスコードとビジョンポイントをMech-Centerに返します。
-
Mech-Centerは、ステータスコードとビジョンポイントをロボットに返します。
|
ロボットの把持を容易にするために、Mech-Centerは把持するワークの位置姿勢をロボットのTCP位置姿勢に変換します。 |
通信メッセージのフォーマット
詳細は下記の通りです。
| リクエストコマンド | ワーク番号 | |
|---|---|---|
送信(ロボット → IPC) |
|
整数、 「1~100」の範囲 |
ステータスコード |
ビジョンポイント(TCP座標) |
|
受信(IPC → ロボット) |
「0~4」範囲内にある整数です。0-正常認識;1-エラーのコマンドコード;2-Mech-Visionプロジェクトが登録されない;3-ビジョンポイントなし;4-点群なし |
カンマ「,」で区切られた6つの浮動小数点データ (x,y,z,a,b,cの形式) |
|
応答メッセージの長さは固定です。応答メッセージのステータスコードが異常コード(1~4)の場合、ビジョンポイントのデータは0で埋める必要があります。 |
通信メッセージの例
リクエストメッセージ
P,1通常応答時のメッセージ
0,1994.9217,-192.198,506.4646,-23.5336,-0.2311,173.6517|
本例では、Mech-Visionは正常に認識し、「1994.9217,-192.198,506.4646,-23.5336,-0.2311,173.6517」のTCP座標を返します。 |
異常応答時のメッセージ:エラーのコマンドコード
1,0,0,0,0,0,0異常応答時のメッセージ:Mech-Visionプロジェクトが登録されない
2,0,0,0,0,0,0異常応答時のメッセージ:ビジョンポイントなし
3,0,0,0,0,0,0異常応答時のメッセージ:点群なし
4,0,0,0,0,0,0プログラミング手順
プロジェクトの要件を満たすために、本例では、下図に示すような手順に従ってAdapterプログラムを作成します。
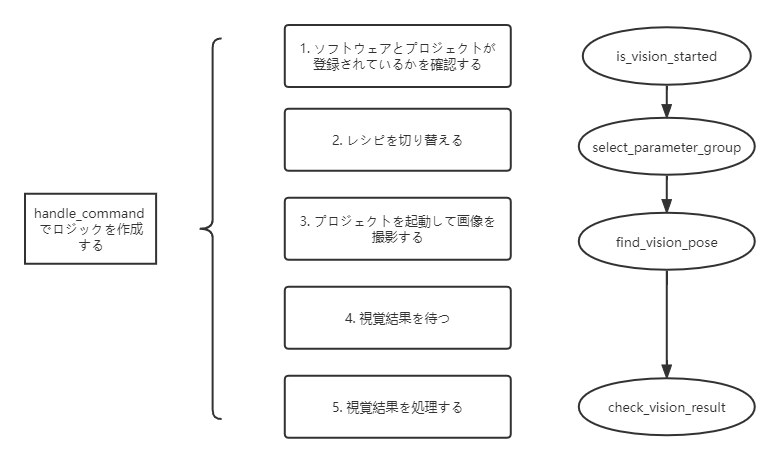
上記の図は、サンプルプログラムのメッセージ処理ロジックのみを示しています。以下では、サンプルプログラムについて詳しく説明します。
サンプルプログラムの詳細な説明
|
クリックして Adpaterサンプルプログラム をダウンロードします。 |
Pythonパッケージのインポート
Adapterプログラムが依存するすべてのモジュールをインポートします。
import json
import logging
import math
import sys
from time import sleep
import os
sys.path.append(os.path.abspath(os.path.join(os.path.dirname(__file__), "..", "..")))
from transforms3d import euler
from interface.adapter import TcpServerAdapter, TcpClientAdapter
from util.transforms import object2tcpクラスの定義
「TcpServerAdapter」親クラスを継承した「TestAdapter」サブクラスを定義します。
class TestAdapter(TcpServerAdapter):
vision_project_name = "Large_Non_Planar_Workpieces"
# vision_project_name = 'Vis-2StationR7-WorkobjectRecognition-L1'
is_force_real_run = True
service_name = "test Adapter"
def __init__(self, address):
super().__init__(address)
self.robot_service = None
self.set_recv_size(1024)|
本例では、AdapterプログラムをTCP/IP Socket通信用のサーバーとして定義します。 |
受信コマンドと処理ロジックの設定
リクエスト(画像撮影コマンド、パラメータレシピ含む)を受け取る処理ロジックを設定します。
# Receive command _create_received_section
def handle_command(self, cmds):
photo_cmd, *extra_cmds = cmds.decode().split(',')
recipe = extra_cmds[0]
# Check command validity _check_cmd_validity_section
if photo_cmd != 'P':
self.msg_signal.emit(logging.ERROR, 'Illegal command: {}'.format(photo_cmd))
self.send(('1' + '' + '').encode())
return
# Check whether vision is registered _check_vision_service_section
if not self.is_vision_started():
self.msg_signal.emit(logging.ERROR, 'Vision not registered: {}'.format(self.vision_project_name))
self.send(('2' + '' + '').encode())
return
# Change TODO parameter "extra_cmds" according to actual conditions
sleep(0.1) # wait for a cycle of getting in Vision
# _check_vision_result_function_section
try:
result = self.select_parameter_group(self.vision_project_name, int(recipe) - 1)
if result:
result = result.decode()
if result.startswith("CV-E0401"):
self.send(('5' + '' + '').encode())
return
elif result.startswith("CV-E0403"):
self.send(('5' + '' + '').encode())
return
raise RuntimeError(result)
except Exception as e:
logging.exception('Exception happened when switching model: {}'.format(e))
self.send(('5' + '' + '').encode())
return
self.show_custom_message(logging.INFO, "Switched model for project successfully")
self.msg_signal.emit(logging.WARNING, 'Started capturing image')
try:
self.check_vision_result(json.loads(self.find_vision_pose().decode()))
except Exception as e:
self.msg_signal.emit(logging.ERROR, 'Calling project timed out. Please check whether the project is correct: {}'.format(e))
self.send(('2' + '' + '').encode())|
「handle_command」関数は、TCP/IP Socketサーバーがメッセージを受信するための処理エントリとして使用されます。 |
Mech-Visionからのビジョン結果のチェックを定義
Mech-Visionによって出力されたビジョン結果を確認するようにAdapterを設定します。
# Check vision results
def check_vision_result(self, vision_result, at=None):
noCloudInRoi = vision_result.get('noCloudInRoi', True)
if noCloudInRoi:
self.msg_signal.emit(logging.ERROR, 'No point clouds')
self.send(('4' + '' + '').encode())
return
poses = vision_result.get('poses')
labels = vision_result.get('labels')
if not poses or not poses[0]:
self.msg_signal.emit(logging.ERROR, 'No visual points')
self.send(('3' + '' + '').encode())
return
self.send(self.pack_pose(poses, labels).encode())
self.msg_signal.emit(logging.INFO, 'Sent TCP successfully')ビジョンポイントの出力形式を設定
ビジョンポイントが外部への出力形式を設定します。
# Pack pose _pack_pose_section
def pack_pose(self, poses, labels, at=None):
pack_count = min(len(poses), 1)
msg_body = ''
for i in range(pack_count):
pose = poses[i]
object2tcp(pose)
t = [p * 1000 for p in pose[:3]]
r = [math.degrees(p) for p in euler.quat2euler(pose[3:], 'rzyx')]
p = t + r
self.msg_signal.emit(logging.INFO, 'Sent pose: {}'.format(p))
msg_body += ('{:.4f},' * (len(p) - 1) + '{:.4f}').format(*p)
if i != (pack_count - 1):
msg_body += ','
return '{},'.format(0) + msg_body + ''Adapterの閉じる操作を定義
Adapterを閉じる方法を定義します。
def close(self):
super().close()