相对移动¶
功能描述¶
基于已知运动点的相对移动,可以设置不同坐标系、不同方向的相对移动和旋转移动。
参数说明¶
- 移动任务基本参数
请参见:移动任务基本参数 。
- 被抓物体碰撞检查模式
请参见:被抓物体碰撞检查模式 。
- 基本运动信息
请参见:基本运动信息 。
- 相对于(移动任务)
 默认值:当前值列表:当前、下一个、选择调节说明:当前 即表示相对于上一个移动指令进行偏移。 下一个 即表示相对于下一个指令进行偏移。
默认值:当前值列表:当前、下一个、选择调节说明:当前 即表示相对于上一个移动指令进行偏移。 下一个 即表示相对于下一个指令进行偏移。
- 坐标系
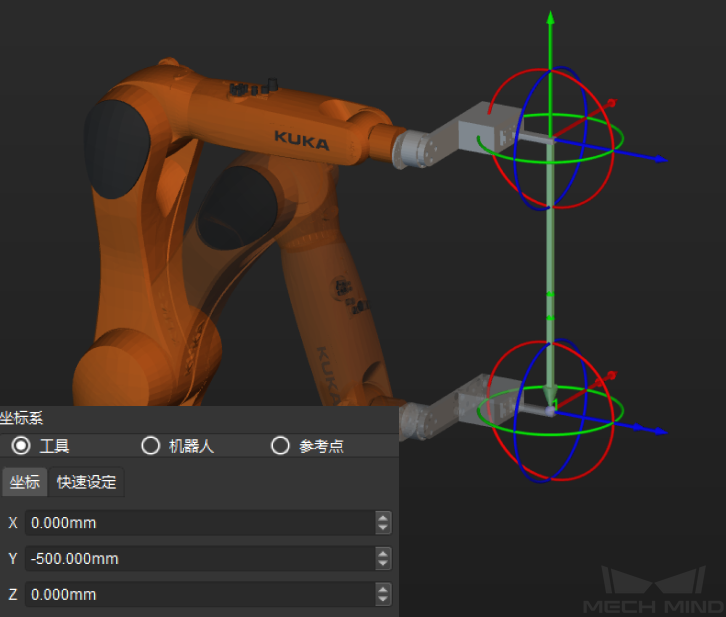
 默认值:工具值列表:工具、机器人、参考点
默认值:工具值列表:工具、机器人、参考点工具: 坐标设置对应值,相对移动 会基于 工具坐标系 的方向进行偏移 ,如下图所示。
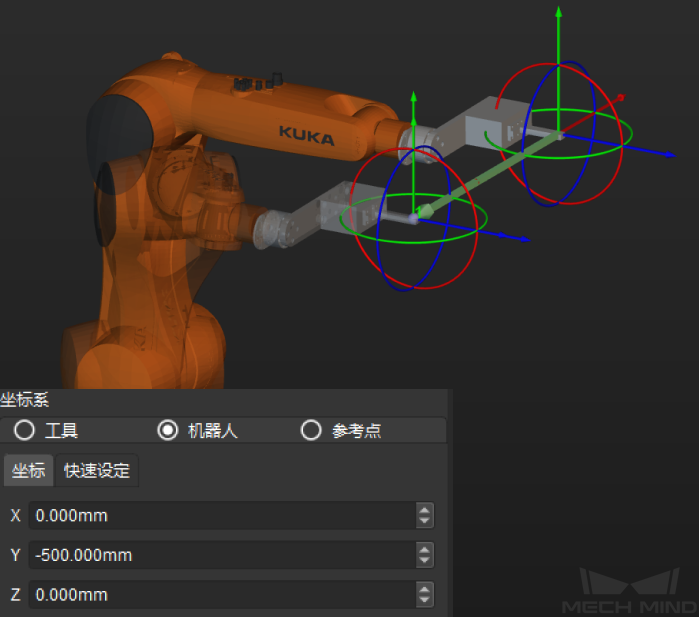
机器人:坐标设置对应值,相对移动 会基于 机器人基坐标系 的方向进行偏移,如下图所示。
参考点:使用参考点相当于自定义了一个参考方向。当物体堆放于深筐中,若垂直向上的抓取存在与筐壁碰撞的可能,此时可将 坐标系 值选为 参考点 ,相对移动会以 参考点 为目标方向进行移动。此任务一般搭配 视觉移动 使用。
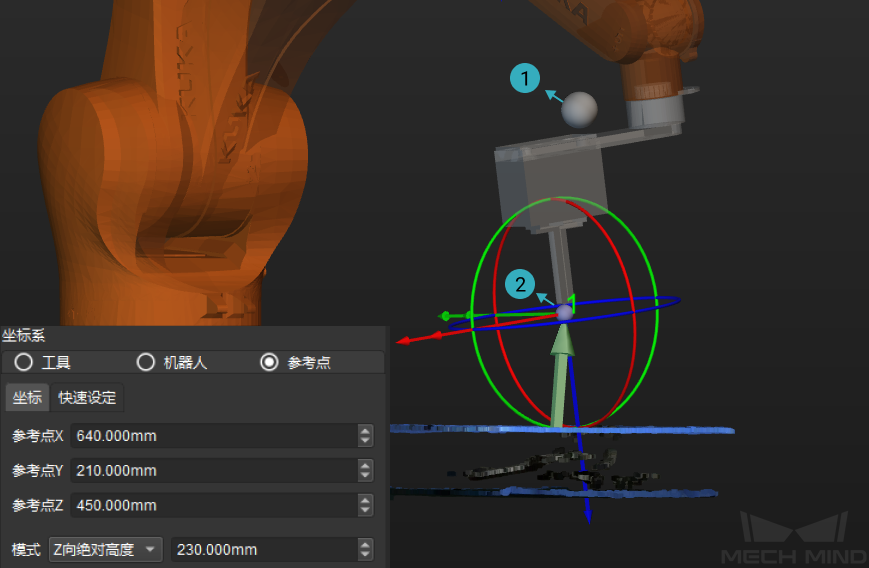 上图所示中 ① 为参考点,② 为偏移点。模式:Z向绝对高度 :偏移点距离机器人基坐标系的 XOY 平面的垂直距离。移动距离 :偏移点在参考方向上的移动距离。
上图所示中 ① 为参考点,② 为偏移点。模式:Z向绝对高度 :偏移点距离机器人基坐标系的 XOY 平面的垂直距离。移动距离 :偏移点在参考方向上的移动距离。
- 锁定X/Y/Z
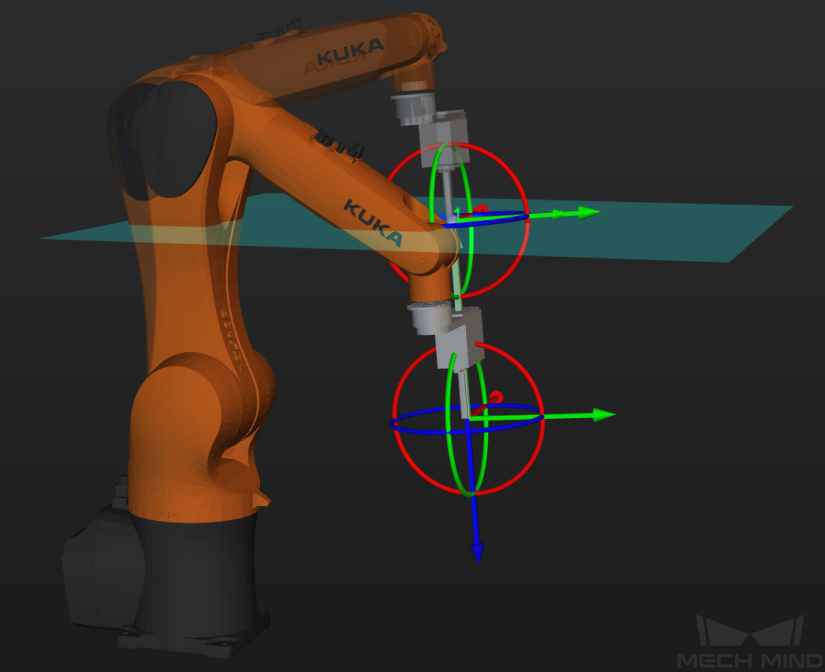
 调节说明:常用勾选 锁定Z , 配合 视觉移动 一起使用,可以固定当前的相对移动到指定 Z 值。勾选 锁定Z 后出现平面。每次相对移动的 Z 值均为固定值,这样机器人每次抓取完都可以抬高到固定高度,如下图所示。
调节说明:常用勾选 锁定Z , 配合 视觉移动 一起使用,可以固定当前的相对移动到指定 Z 值。勾选 锁定Z 后出现平面。每次相对移动的 Z 值均为固定值,这样机器人每次抓取完都可以抬高到固定高度,如下图所示。