移动¶
功能描述¶
设定机器人运动路径中的一个目标位姿和运动到该位姿的方式。
参数说明¶
- 移动任务基本参数
请参见: 移动任务基本参数 。
- 被抓物体碰撞检查模式
请参见: 被抓物体碰撞检查模式 。
- 基本运动信息
请参见: 基本运动信息 。
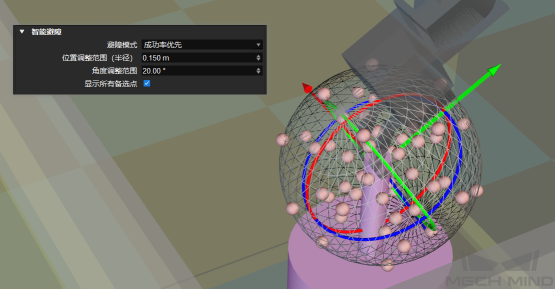
智能避障
该功能本质上是为移动任务的目标点增加多个周边的备选点,使机器人可以规划的路径数量更多,降低调试难度,提高规划成功率。 一般用于解决深筐抓取中出筐点难以配置的问题。
- 避障模式
- 位置调整范围(半径)
- 角度调整范围
- 显示所有解
默认勾选,显示所有备选点。取消勾选后,将不显示备选点。
- 调节示例
注解
对于两个都开启避障功能且串接在一起的移动类任务 “移动_1” 和 “移动_2”,规划路径数量并不是两个移动备选点数相乘,而是相加,即依次进行规划。