机器人构型¶
轴数 |
六轴 |
六轴 |
|||
构型 |
构型名称 |
UR_UR5_Like |
SphericalWrist_SixAxis |
||
构型描述 |
六轴协作机器人 |
常见工业六轴球型腕机器人 |
|||
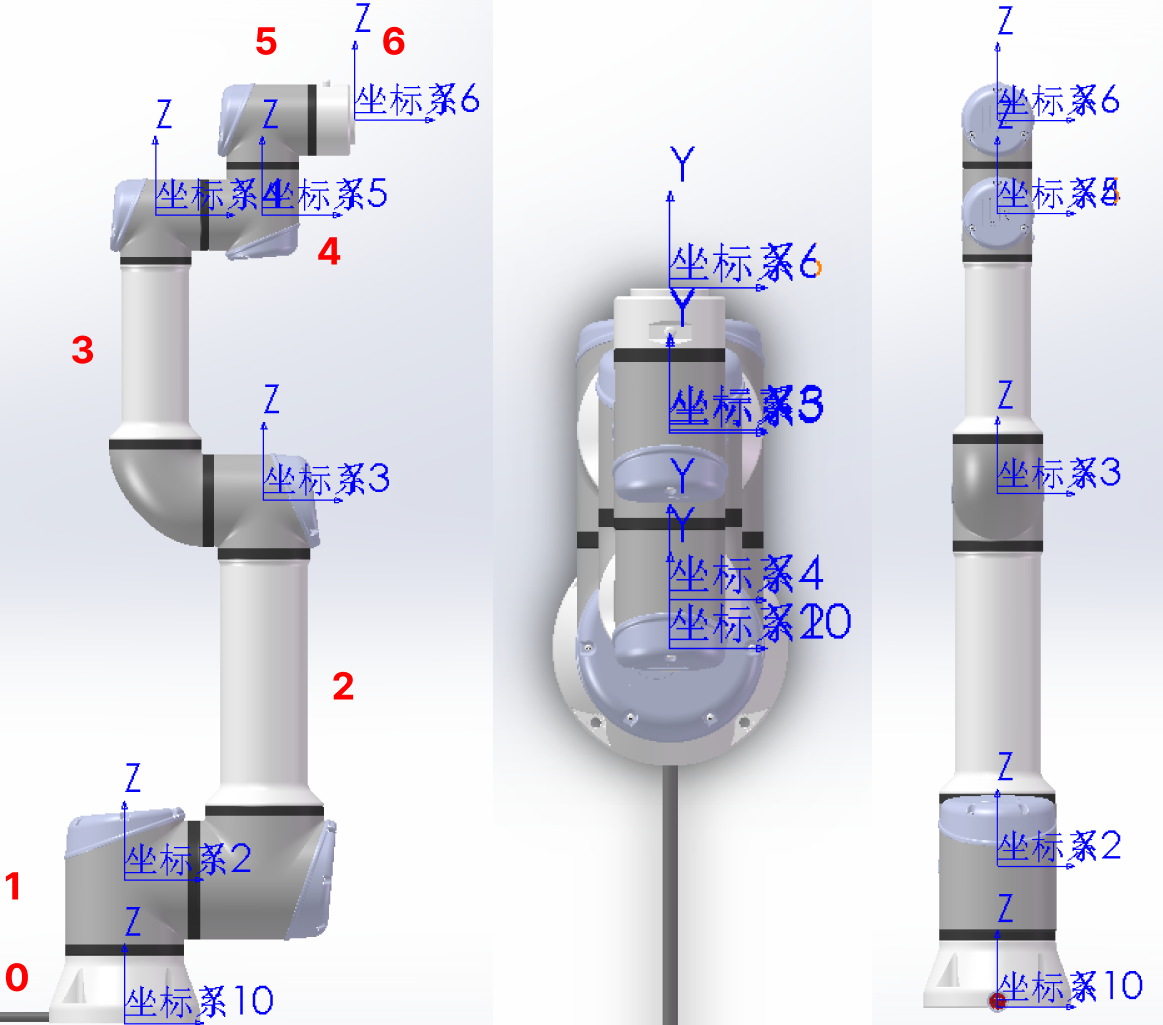
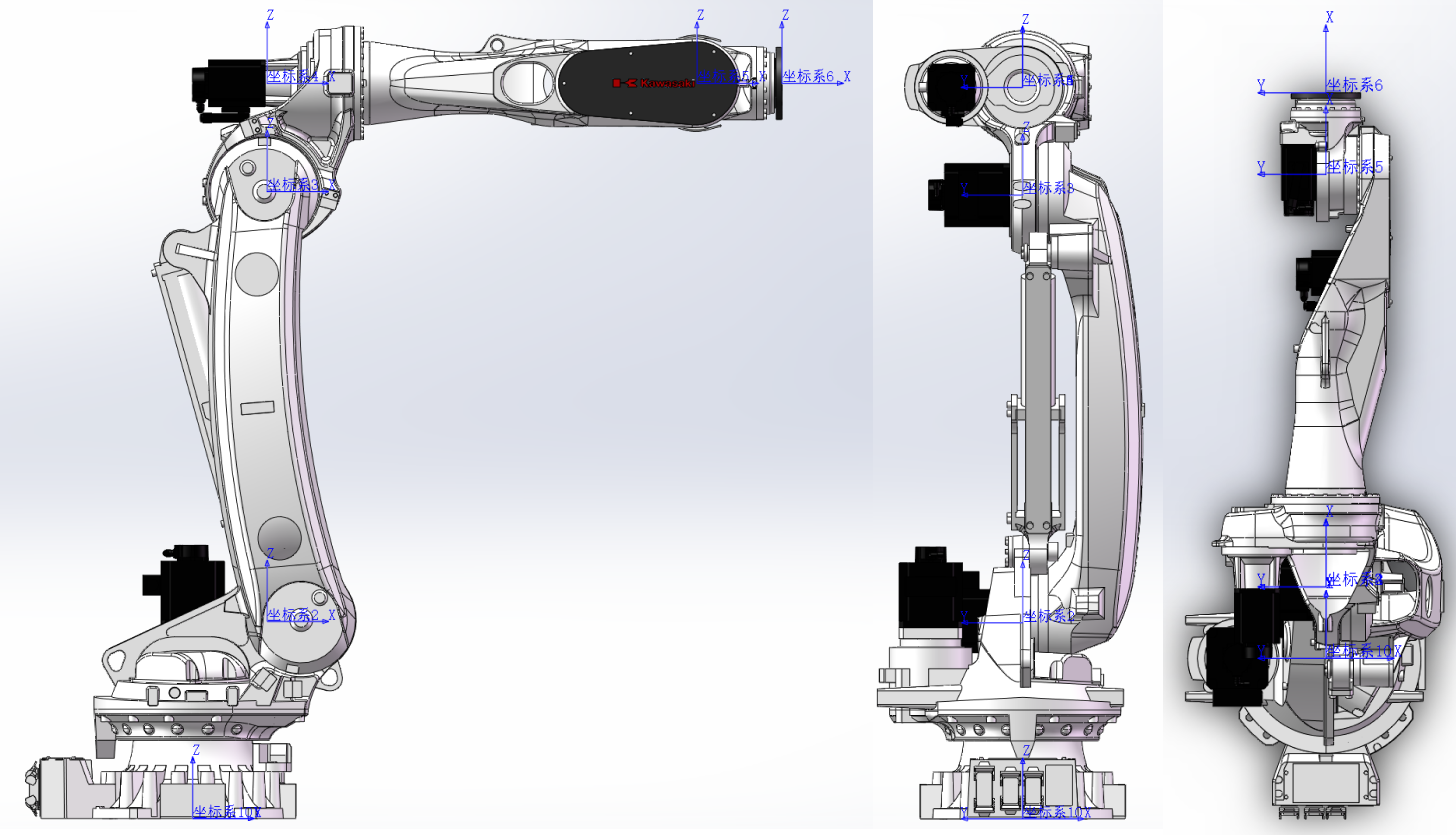
机器人 构型图 |
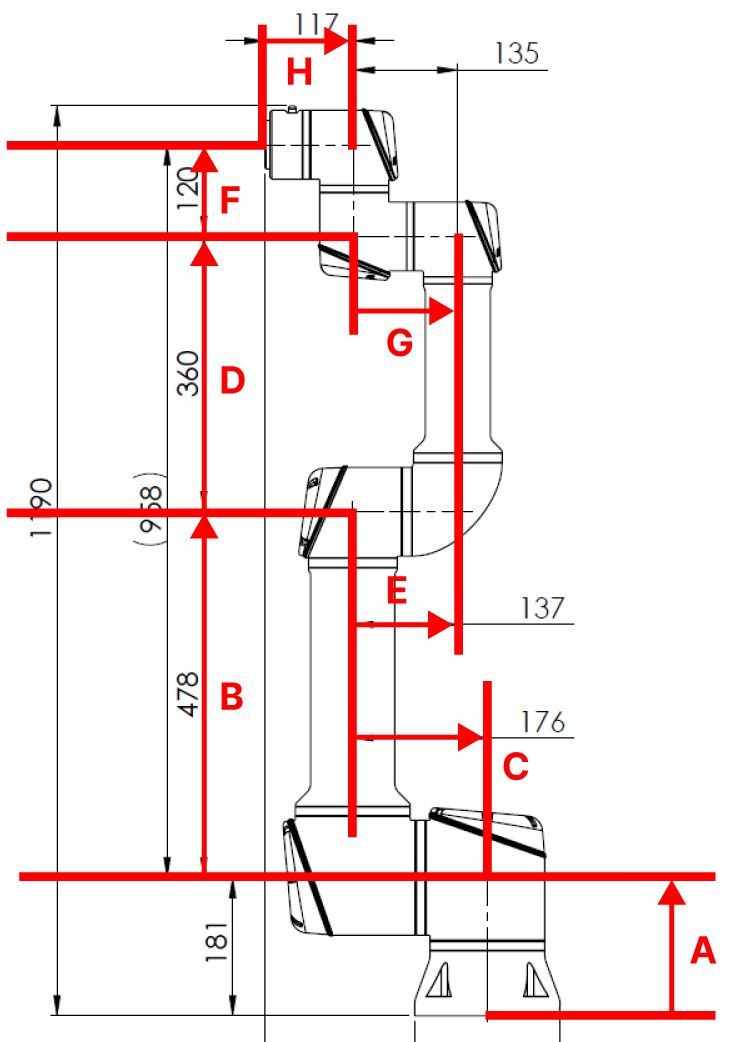
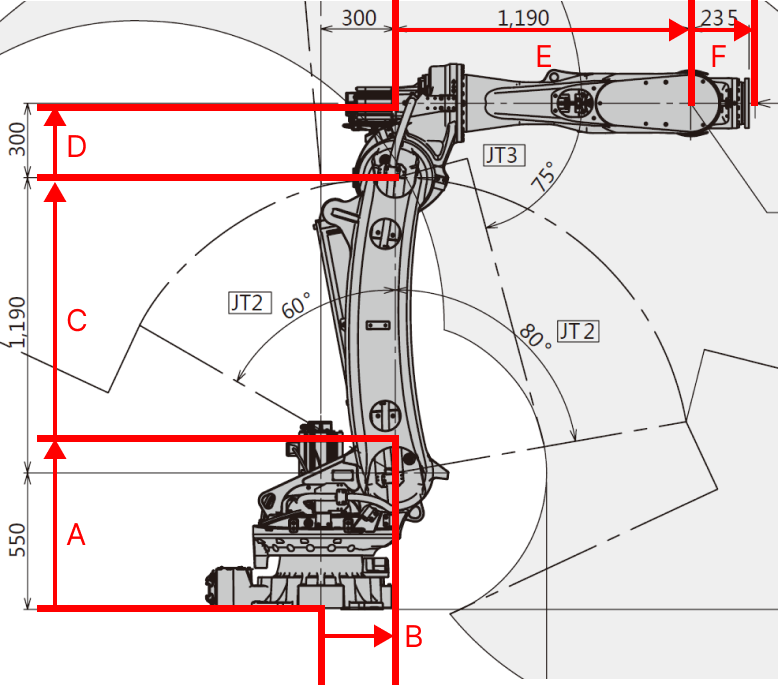
DH参数图 |
|
|
||
坐标系 各轴名称 |
|
|
|||
连杆、坐标系 对应关系 |
0:坐标系10; 1:坐标系10; 2:坐标系2; 3:坐标系3; |
4:坐标系4; 5:坐标系5; 6:坐标系6; |
0:坐标系10; 1:坐标系10; 2:坐标系2; 3:坐标系3; |
4:坐标系4; 5:坐标系5; 6:坐标系6; |
|
[robot]_algo 样例 |
{
"algo_type": "UR_UR5_Like",
"robot_type": "UR_16E",
"dh": [ A, B, D, G, F, H ],
"shoulder_offset": C,
"elbow_offset": E,
"min_limits": [ J1 min, J2 min, J3 min, J4 min, J5 min, J6 min ],
"max_limits": [ J1 max, J2 max, J3 max, J4 max, J5 max, J6 max ],
"mastering_joints": [ J1, J2, J3, J4, J5, J6 ], # Unnecessary
"axis_flip": "J1J2J3J4J5J6" # Unnecessary
}
|
{
"algo_type": "SphericalWrist_SixAxis",
"robot_type": "KAWASAKI_CX110L",
"dh": [ A, B, C, D, E, F ],
"min_limits": [ J1 min, J2 min, J3 min, J4 min, J5 min, J6 min ],
"max_limits": [ J1 max, J2 max, J3 max, J4 max, J5 max, J6 max ],
"mastering_joints": [ J1, J2, J3, J4, J5, J6 ], # Unnecessary
"axis_flip": "J1J2J3J4J5J6" # Unnecessary
}
|
|||