基础概念介绍¶
机器人
除非特别说明,本文中的机器人指由关节连接的刚体所构成的系统,如下图所示:

TCP[Tool Center Point](工具中心点)
机器人通常配备有末端工具,它是与周围世界的物体进行交互的载体,工具中心点即为末端工具尖端点。 为了完成如物体抓取等任务,当让机器人移动至空间的某一点时,其本质是让工具中心点移动至该点。
位姿
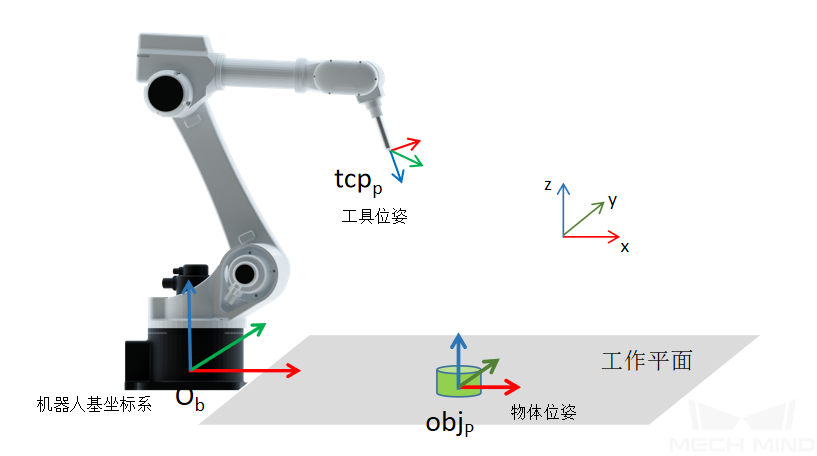
物体在空间的位置和姿态统称为位姿。位姿以平移+旋转(四元数或欧拉角)表示。在 Mech-Viz 中,位姿分为工具位姿和物体位姿。工具位姿
指 TCP 相对于机器人基座的位姿。
物体位姿
物体位姿是物体中心相对于机器人基座的位姿。当物体附着于机器人末端时,默认初始物体位姿与工具位姿的坐标相同,而姿态相反。
注解
默认工具位姿的 Z 轴与世界坐标系的 Z 轴呈钝角。抓取物体时,物体位姿的 Z 轴与工具位姿的 Z 轴必须为反向。
机器人运动学可分为两个基本问题:正向运动学与逆向运动学。
正向运动学
给定机器人各关节变量,计算机器人末端的位置姿态。当给定一组机器人的关节变量,工具位姿是唯一确定的。逆向运动学
已知机器人末端的位置姿态,计算机器人对应位置的全部关节变量。对于某一特定的工具位姿,对应的关节变量可能存在多组解或无解。
自由度
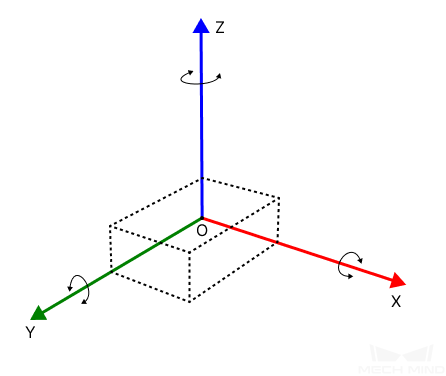
自由度通俗来讲就是描述物体的运动的灵活程度,任何一个没有受约束的物体,在空间中具有6个独立的运动。
以下图虚线标注的长方体为例,它在直角坐标系 OXYZ 中有3个平移运动(沿X、Y、Z轴的平移)和3个转动(绕X、Y、Z轴的转动)。
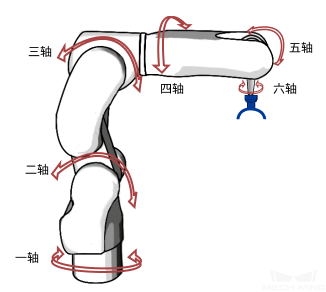
常见的六轴机器人一般有6个自由度,如下图所示。
抓-放
抓-放描述机器人和物体互动的方式。
抓
机器人运动到抓取点,并通过改变外部接口信号控制末端工具对物体进行抓取,称为“抓”。 一旦“抓”的状态生效,物体与机器人 TCP 的相对位置产生绑定。
拿
从机器人抓起物体到放置之前的状态称为“拿”。 “拿”状态下,物体与机器人的绑定关系始终存在。此状态会在物体抓取后自动生效,不可在软件中选择。
放
机器人运动到放置点,并通过改变外部接口信号控制末端工具释放,称为“放”。 当“放”状态生效后,物体与机器人 TCP 的相对位置绑定关系释放。
对称性
每一个待抓物体,均有相应的物体位姿。实践中经常遇到具有对称性的物体,对于这些物体,机器人按照其 对称性角度 可以有多种方式进行抓取或放置,其结果是相同的。
对称性角度
物体或抓取点绕 X/Y/Z 轴每转 α° 可认为和之前一致。例如:正方形是 90°、矩形是 180°、正六边形是 60°、圆或圆环是 0°、无旋转对称是 360°,如下图所示: 其中,绕 Z 轴产生的对称性称为强轴对称性,绕 X 或 Y 轴产生的对称性称为 弱轴对称性 。
其中,绕 Z 轴产生的对称性称为强轴对称性,绕 X 或 Y 轴产生的对称性称为 弱轴对称性 。弱轴对称性
通常会以对称性更强的一方作为实际参与计算的弱轴对称性,忽略另一轴的对称性。例如:若 X 轴存在 90° 对称性,Y 轴存在 0° 对称性,则认为弱轴为 Y 轴,此时弱轴对称性为 0°。用户可以通过设置物体对称性,让软件来选择最优的抓放路径,改善可达性、减少机器人末端的旋转。物体对称性
物体对称性用于物体位姿。如物体对称性为 180° 时,机器人抓取/放置物体时可在“正”“反”中随意选取,减少机器人末端的转动。如下图所示: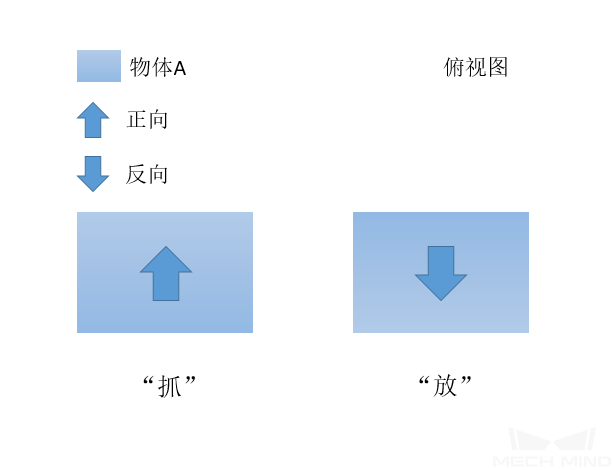 物体正向与反向的状态可视为相同,此时机器人可选择正向抓取,反向放置。
物体正向与反向的状态可视为相同,此时机器人可选择正向抓取,反向放置。抓取点对称性
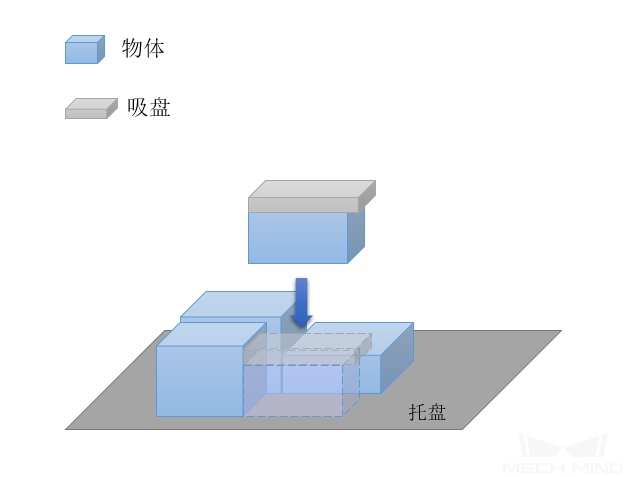
抓取点对称性与抓取工具抓取物体的方式有关,用于选择最优的抓取位姿。如:当物体小于吸盘尺寸时,为防止抓取过程中碰撞周围待抓物体,采用偏置吸盘的方式抓取物体,此时物体对称性不生效,而抓取点存在 180° 对称角度,可以在最初的抓取点旋转抓取工具,“正抓”或“反抓”,如下图所示: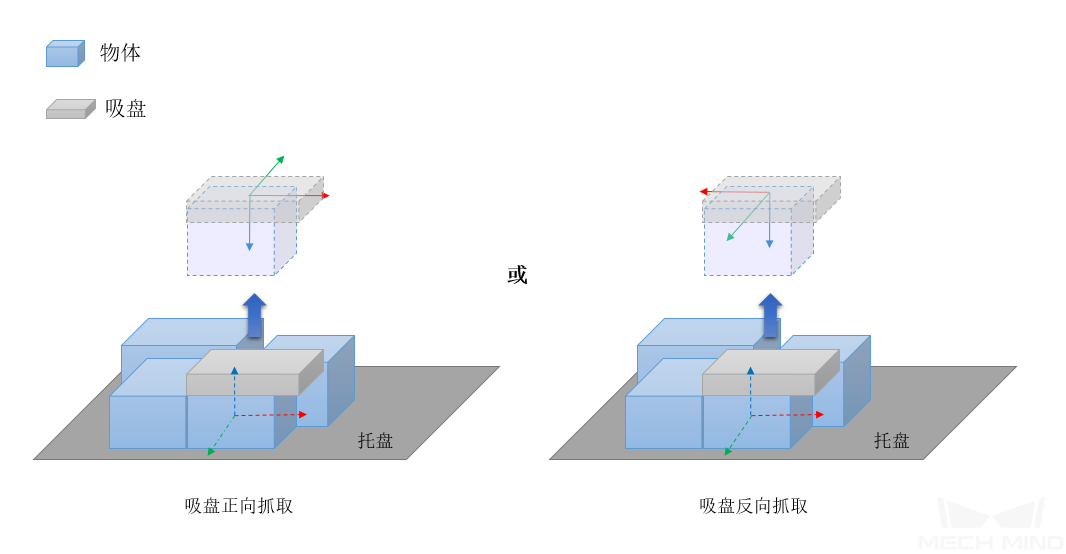 为规划最优运动路径,在抓取过程中,软件会同时考虑抓取点对称性和物体对称性,而在“拿”和“放”时会根据物体对称性选择物体位姿。例如:物体为连杆时,可使用夹爪向外抓取圆环,如下图所示:
为规划最优运动路径,在抓取过程中,软件会同时考虑抓取点对称性和物体对称性,而在“拿”和“放”时会根据物体对称性选择物体位姿。例如:物体为连杆时,可使用夹爪向外抓取圆环,如下图所示: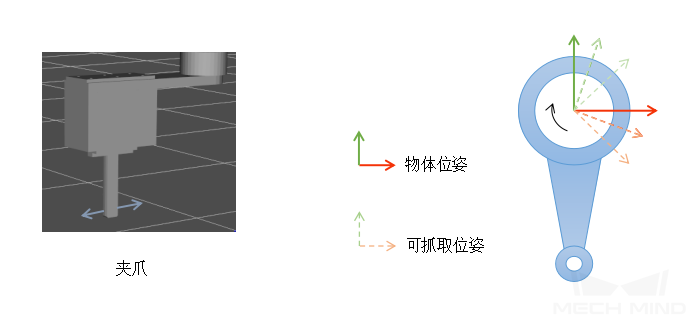 此时抓取点对称性为 0°,任意角度在抓取时都是可选的,此时抓取点对称性应根据计算量设置合理的尝试步长(如1°、10°等)。但由于无物体对称性,欲放置成设定的物体位姿,软件会还原抓取时抓取工具与物体的相对变换。
此时抓取点对称性为 0°,任意角度在抓取时都是可选的,此时抓取点对称性应根据计算量设置合理的尝试步长(如1°、10°等)。但由于无物体对称性,欲放置成设定的物体位姿,软件会还原抓取时抓取工具与物体的相对变换。
抓取工具偏置
当视觉结果引导机器人抓取时,针对尺寸较小或形状较复杂的物体,为避免碰撞其他待抓物体,可偏置抓取工具的中心到物体某一点进行抓取。 确定抓取工具类型及偏置策略后,由 Mech-Viz 计算偏置值并结合点云碰撞检查判断是否可抓。如下图所示:
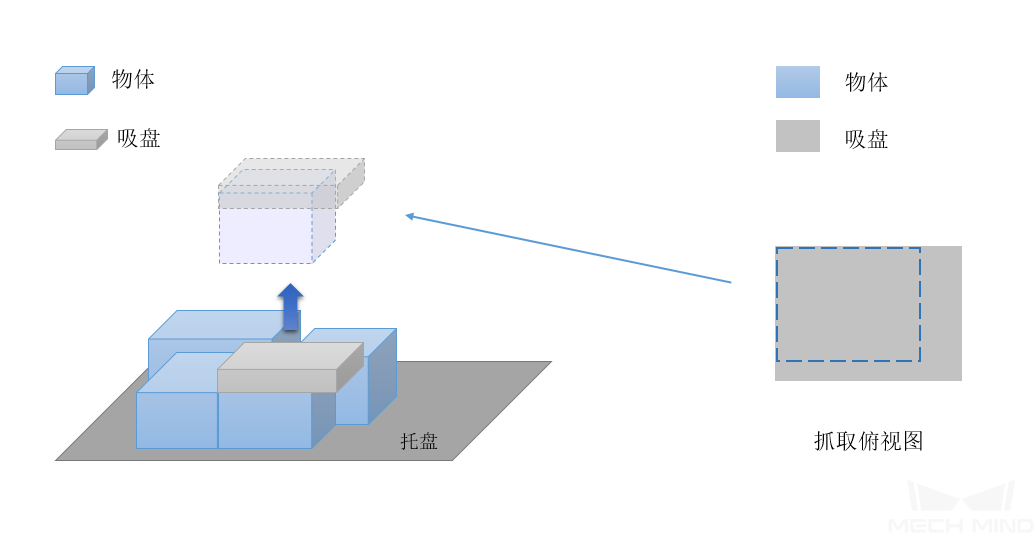
同理,混码物体时,机器人放置物体需要避免碰撞已经放置在周围的物体,抓取工具偏置可解决此问题。