4. 피킹된 물체 구성¶
피킹된 물체는 물체를 이동하는 과정에서의 충돌을 감지하는 데 사용됩니다. 주로 다음과 같이 두 가지로 나눕니다.
4.1. 직육면체¶
직육면체 모델을 추가하는 방식:
Mech-Vision 에서 직사각형의 사이즈와 포즈를 계산하기 、 평면 포인트 클라우드의 포즈와 크기를 계산하기 、 물체 사이즈 읽기 스텝을 통해 물체의 치수를 계산하고 결과는 출력 을 통해 Mech-Viz로 보낸 후 Mech-Viz에서 자동으로 해당 충돌 모델을 생성할 것입니다.
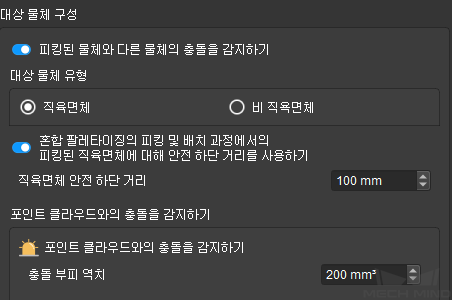
직육면체 안전 하단 거리 설정:
설명: 직육면체 물체 구성에서 직육면체 안전 하단 거리를 설정하는 기능이 있습니다. 주로 피킹된 상자의 충돌 모델의 밑바닥과 지면 사이의 거리를 증대하여 더욱 안전한 배치 경로를 선택하고 이미 배치된 상자와 충돌하는 것을 피하기 위해서입니다. 아래 그림과 같습니다. 현재 이 기능은 혼합 팔레타이징 에만 사용되며 반드시 활성화되어야 합니다.파라미터 설정: 혼합 팔레타이징의 피킹 및 배치 과정에서의 피킹된 직육면체에 대해 안전 하단 거리를 사용하기 옵션을 선택하여 직육면체 안전 하단 거리 를 설정하십시오. 권장값:80mm-120mm.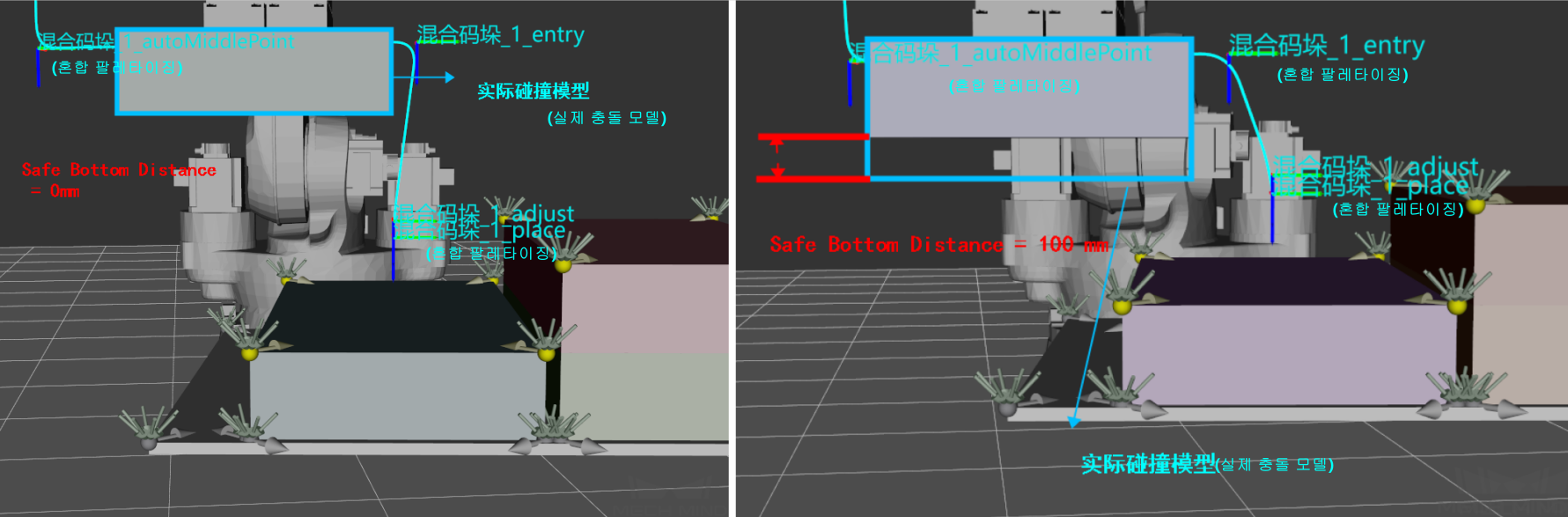
충돌 부피 역치 설정:
충돌 감지를 할때 피킹된 직육면체가 다른 부품과 충돌할 수 있는 부피.
설정이 끝난 뒤 피킹된 직육면체를 포함한 충돌 감지 시나리오를 획득합니다. 아래 그림과 같습니다.

4.2. 비 직육면체¶
비 직육면체 모델을 추가하는 방식:
물체의 STL 모델과 binvox 모델 파일을 프로젝트 폴더의 collision_models 폴더로 이동합니다. 다음으로 Mech-Vision에서 포인트 클라우드를 외부 서비스로 보내기 스텝을 사용하여 파라미터 물체 정보를 보내기 를 Ture 로 선택하십시오.
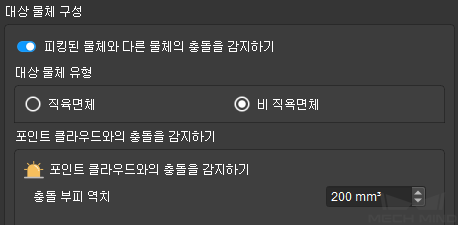
충돌 부피 역치 설정:
충돌 감지를 할때 피킹된 비 직육면체가 다른 부품과 충돌할 수 있는 부피를 말합니다.
설정이 끝난 뒤 피킹된 비 직육면체를 포함한 충돌 감지 시나리오를 획득합니다. 아래 그림과 같습니다.

주의
Mech-Viz 1.6.0은 비 볼록다면체 obj 모델에 대한 충돌 감지를 지원하지 않습니다.