직사각형의 사이즈와 포즈를 계산하기¶
기능 설명
뎁스 맵과 직사각형의 정보를 통해 3D 공간에서 직사각형의 포즈를 계산합니다.
응용 시나리오
스텝 겹치는 다각형을 제거하기 와 함께 사용해야 하며 2D 매칭 을 통해 카메라 좌표계에서 획득한 직사각형 물체의 포즈를 계산합니다.
입력 및 출력
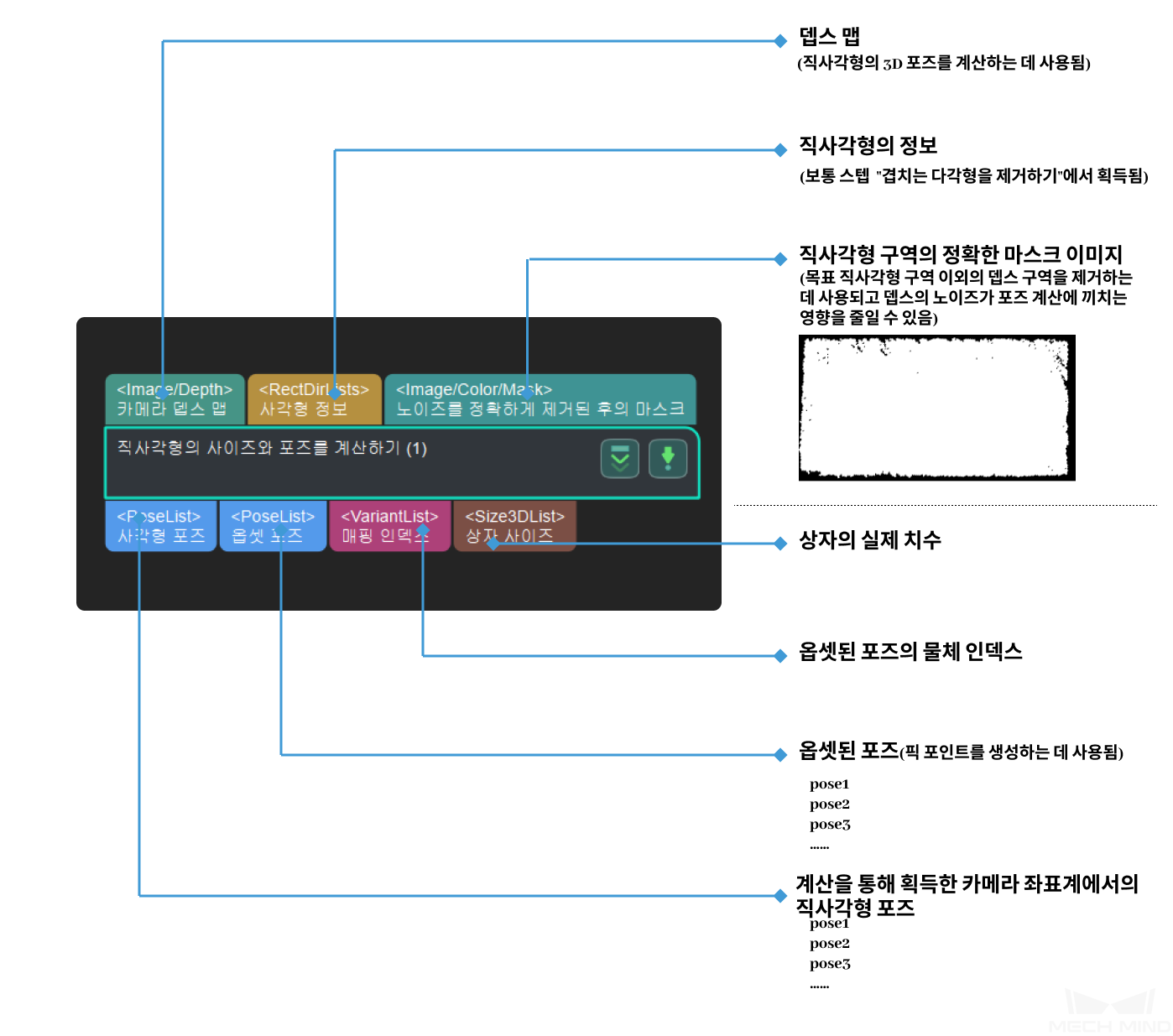
파라미터 설명
입력 유형(inputType)
설명: 이 파라미터로 입력 유형을 선택할 수 있습니다.기본값: Depth권장 값: 실제 상황에 따라 설정합니다.값 리스트: Depth, VertexAndSizeInputDepth
검색 반경(searchRadius)
설명: 이 파라미터로 이미지에서 지정된 위치의 뎁스 검색 반경을 조절할 수 있습니다. 단위는 픽셀입니다. 이 파라미터는 “입력 유형(inputType)”이 “Depth”가 될 때만 유효합니다.기본값: 20권장 값: 20유효 범위:[0,+∞)X축에 따른 빨판의 길이(suckerLengthX)
조정 설명: 이 파라미터로 빨판으로 덮인 구역 X방향의 사이즈를 조절하여 크기를 조절할 수 있습니다. 단위는 m입니다. 빨판이 목표 상자보다 크면 옆 상자를 피킹하지 않도록 작게 조정해야 합니다.기본값: 0권장 값: 빨판이 목표 상자보다 작은 경우 0으로 설정하고 빨판이 목표 상자보다 큰 경우 빨판의 실제 사이즈에 따라 설정하는 것을 추전합니다.유효 범위:[0,+∞)Y축에 따른 빨판의 길이(suckerLengthY)
조정 설명: 이 파라미터로 빨판으로 덮인 구역 Y방향의 사이즈를 조절하여 크기를 조절할 수 있습니다. 단위는 m입니다. 빨판이 목표 상자보다 크면 옆 상자를 피킹하지 않도록 작게 조정해야 합니다.기본값: 0권장 값: 빨판이 목표 상자보다 작은 경우 0으로 설정하고 빨판이 목표 상자보다 큰 경우 빨판의 실제 사이즈에 따라 설정하는 것을 추전합니다.유효 범위:[0,+∞)빨판과 다른 상자가 겹치는 비율의 역치(suckerMaskOtherRectRatio)
설명: 빨판이 작업 과정에서 옆 상자를 피킹하지 않기 위해 이 수치를 현재 피킹 단계를 수행할지 여부를 결정하는 기준으로 사용합니다. 비목표 상자와 겹치는 비율이 이 수치보다 작으면 피킹을 진행하고, 이 수치보다 크면 피킹을 진행하지 않습니다.기본값: 0.3권장 값: 실제 상황에 따라 설정합니다.포즈 출력 방법(output strategy)
출력할 하나의 상자의 포즈 수를 지정합니다.
설명: 이 파라미터는 하나의 상자에 대해 하나의 포즈만 출력하는지를 결정합니다.기본값: One권장 값: One값 리스트: One, Multiple.