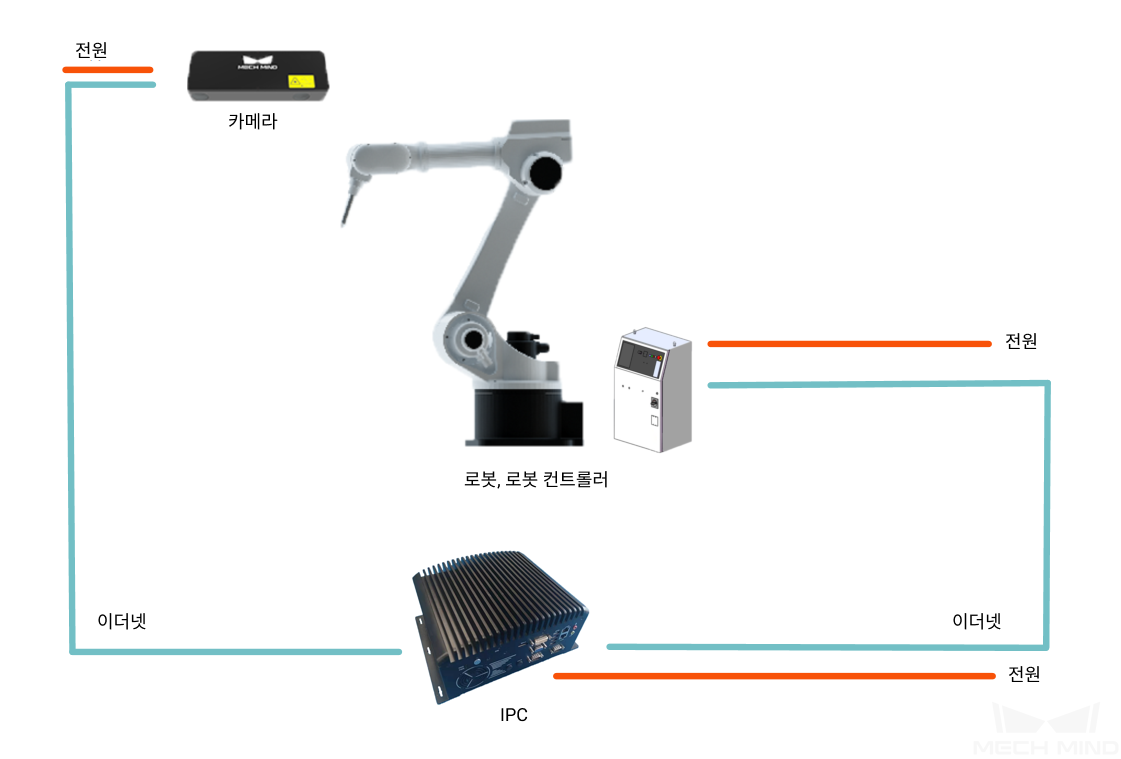
시스템 전체를 연결하기¶
각 하드웨어 간의 연결을 구축하기 위해 카메라와 로봇을 설치한 다음에 케이블로 하드웨어들을 IPC와 연결시켜야 합니다.
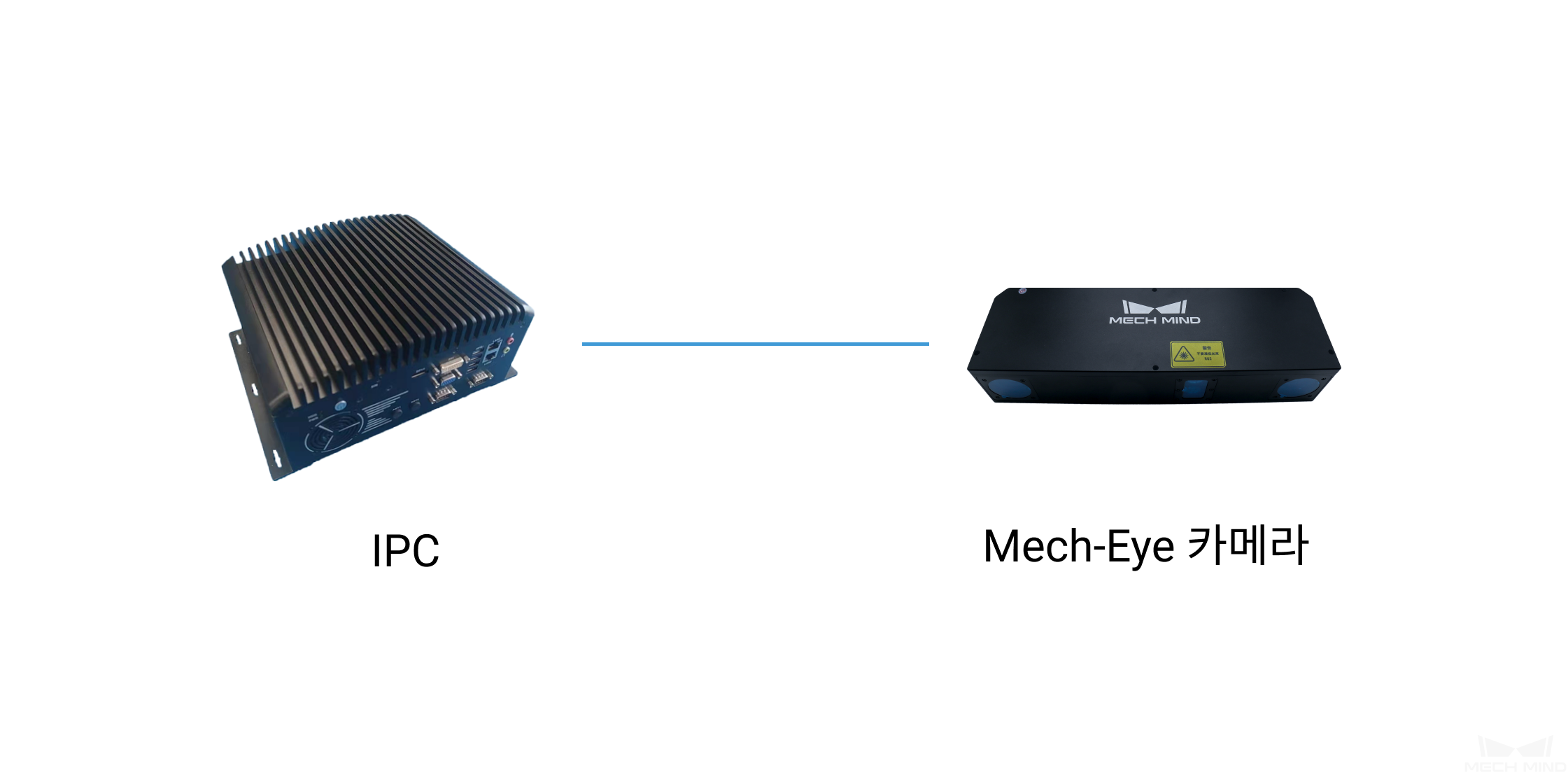
카메라를 IPC로 연결하기¶
당사에서 제공한 네트워크 케이블을 사용하여 카메라 와 IPC 를 연결시킵니다. IPC에는 여러 가지 네트워크 포트가 있는데 임의의 포트를 선택하여 연결시키면 됩니다. 나중에 구체적인 수요에 따라 해당 네트워크 포트의 네트워크 세그먼트를 바꿀 수 있습니다.
로봇을 IPC로 연결하기¶
네트워크 케이블을 사용하여 로봇 컨트롤러 와 IPC 를 연결시킵니다. 연결된 다음에 컨트롤러의 전원을 켜고 티칭 머신을 부팅하세요.
주의
로봇 컨트롤러 네트워크 포트의 선택과 관련된 내용은 로봇 통신 설정 를 참고하세요.
케이블과 로봇 간의 얽히는 리스크를 방지하기 위해 케이블의 올바른 배치에 주의하세요.
IP 설정 및 로봇 통신 구성¶
IPC의 2가지 네트워크 포트를 통해 로봇과 카메라를 각각 연결시켜야 하기 때문에 2개의 IP를 설정해야 합니다. 사용자가 실제 수요에 따라 해당 네트워크 포트, 세그먼트를 설정하여 IPC 및 연결될 설비 가 같은 네트워크 세그먼트에 있는 것을 확보하세요.
이 예시에는 IPC와 로봇을 연결하는 네트워크 포트의 IP는 192.168.100.1입니다.
IPC와 카메라를 연결하는 네트워크 포트의 IP는 192.168.100.2 로 설정되었습니다.
소프트웨어를 통해 리얼 로봇을 컨트롤하기 위해 로봇 통신 설정 에서 해당 로봇 브랜드를 참조하여 로봇 통신을 설정하십시오.
이로써 하드웨어 시스템 연결이 완성됩니다. 마지막으로 회로를 확인하고 전원을 켜세요. 다음 부분에서 IPC 소프트웨어 구성과 관련된 내용을 살펴보세요.