Mech-Viz 시작하기¶
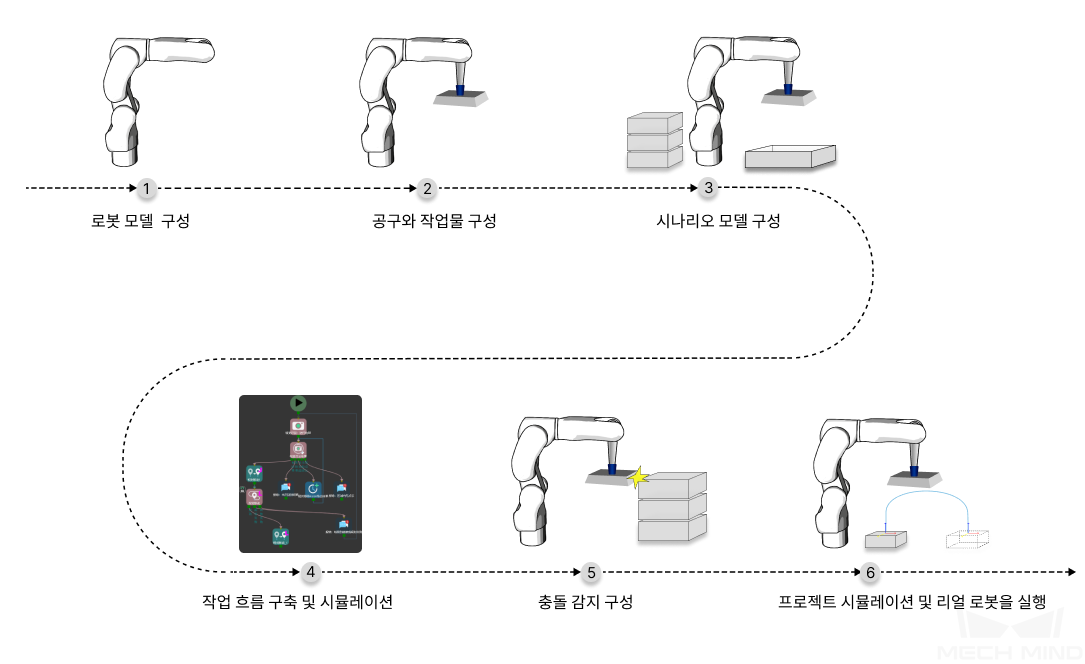
실제 프로젝트에서 Mech-Viz를 사용하여 프로젝트에 대해 디버그하는 프로세스는 아래와 같습니다.
이 부분에서는 종이 상자의 피킹을 예시로 Mech-Viz를 통해 프로젝트를 구축하는 방법을 소개하겠습니다.
사전 준비¶
Mech-Viz 프로젝트를 본격적으로 구축하기 전에 다음과 같은 준비를 해야 합니다.
최대 한 변 길이가 50cm 이하인 여러 상자를 준비합니다.
시스템 전체를 연결하기 내용을 참조하여 필수적인 하드웨어 구성을 완성하십시오.
현장의 로봇 모델에 따라 로봇 통신 설정 을 참조하여 네트워크 구성 및 로봇 프로그램 복제를 완료하여 소프트웨어가 로봇과 통신할 수 있도록 합니다.
종이 상자의 피킹 포즈는 Mech-Vision을 통해 획득한 것입니다. 실용 가이드 내용을 참조하여 비전 처리를 완성하십시오.
시나리오 모델과 엔드 이펙터 모델을 준비해 사용자가 작업 현장의 실제 상황에 따라 설계 및 제작해야 합니다.
첫 프로젝트를 구축하기¶
프로젝트를 순조롭게 구축하기 위해 부디 순서대로 아래 내용을 읽어주십시오.
참고
각 단계의 설정은 Mech-Viz 샘플 프로젝트 , Mech-Vision 샘플 프로젝트 를 예시로 설명하도록 하겠습니다.