계획 기록¶
계획 기록 패널은 Mech-Viz 프로젝트를 실행할 때의 계획 정보 및 오류 설명을 볼 수 있으므로 프로젝트 디버깅에 유용합니다. 이 부분에서는 계획 기록 패널과 관련된 내용을 소개할 것이며 주로 다음 내용을 포함합니다.
개요¶
기능 소개¶
충돌 경보, 도달할 수 없는 위치 등 Mech-Viz 실행 중 문제가 발생하면 계획 기록 을 사용하여 원인을 확인할 수 있습니다.

계획 기록 결과의 전체 구조는 Mech-Viz 계획의 전 과정을 상세하고 완전하게 기록하는 트리 구조입니다. 계획 기록은 로그와 비교하여 계획의 각 노드(특히 실패한 노드)를 자세히 볼 수 있습니다.
일부 오류는 직렬 오류이며 하위 노드 중 하나가 계획에 실패하면 전체 계획이 실패합니다. 예를 들어 특정 관절 각도가 잘못 설정되면 로봇이 계획된 위치에 도달할 수 없습니다.
일부 오류는 병렬 오류이며, 하나의 자식 노드만 성공적으로 계획되면 전체 계획이 성공한 것입니다. 예를 들어, Mech-Vision에서 계산한 픽 포인트에서 노드 중 하나가 성공적으로 실행되면 픽 포인트를 사용하여 물체를 잡을 수 있음을 의미합니다.
힌트
프로젝트를 실행하는 과정에서 실패한 노드에 집중할 수 있습니다.
패널 소개¶
계획 기록 패널은 Mech-Viz 기능 패널에 있습니다.

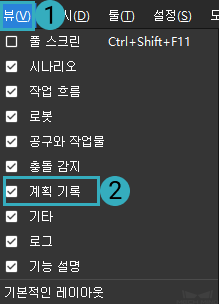
기능 패널에 계획 기록 이 나타나지 않으면 Mech-Viz 소프트웨어 메뉴바 에서 뷰 를 클릭한 다음 계획 기록 을 선택합니다.
계획 기록 패널은 다음과 같은 내용을 포함합니다. ① 계획 내용, 결과(성공 및 실패), 세부 정보 및 모든 하위 노드의 실패 원인 ② 충돌 연속 표시 시간, 만료 시간, 계획 기록 로딩, 지우기, 도움말 ③ 마우스 오른쪽 버튼으로 클릭하면 검색, 모두 접기, 선택된 계획 기록을 삭제하기 기능이 나타납니다.

패널에 있는 각 옵션 또는 버튼의 기능은 다음과 같습니다.
계획 기록 패널 상단의 옵션:
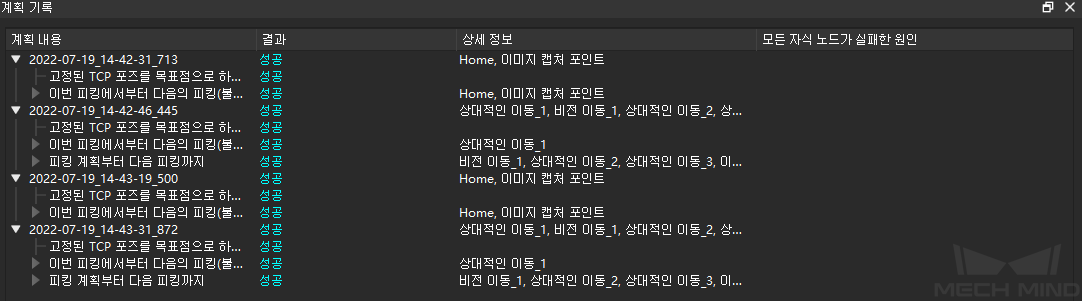
계획 내용: 명칭을 통해 특정 순간의 계획 기록을 조회할 수 있습니다. 펼치면 각 레벨의 계획 내용이 표시됩니다.
결과물: 계획의 성공 여부를 표시하고 실패하면 빨간색으로 표시됩니다. 실패한 항목에 집중하여 특정 정보를 볼 수 있습니다.
상세 정보: 계획된 특정 경로의 이동 태스크와 이 계획 중 기능의 작업 내역을 표시합니다.
자식 노드 실패한 모든 원인: 계획 실패 시 구체적인 실패 이유가 여기에 표시됩니다.
계획 기록 패널 하단의 버튼 또는 옵션:

충돌 표시 지속 시간: 계획 기록을 통해 충돌 표시 시간을 확인하며, 이 시간을 초과하면 계획에 실패한 로봇 포즈가 사라집니다.
만료 시간: 계획 기록 데이터를 저장하는 시간으로, 이 시간을 초과하면 현재 데이터가 기록 데이터를 덮어씁니다.
계획 기록을 로드하기: 저장된 계획 기록을 로드합니다.
지우기: 현재 인터페이스의 계획 기록을 지웁니다.
도움: 계획 기록 소개.
계획 기록 패널에서 마우스 오른쪽 버튼을 클릭해 팝업 한 옵션:

검색: 검색 을 클릭하면 계획 기록 패널 하단에 관련 검색 기능이 나타나며 계획 기록 결과의 종류별로 계획 기록 내용을 검색할 수 있습니다.

모두 접기: 계획 기록의 모든 자식 노드를 접고 부모 노드만 표시합니다.
선택된 계획 기록을 삭제하기: 선택한 계획 기록을 삭제합니다.
충돌 결과의 시각화¶
계획 시 충돌을 표시하기¶
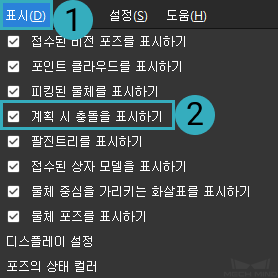
계획 기록에서 충돌 결과의 그래픽 프롬프트를 활성화하려면 소프트웨어의 왼쪽 상단 메뉴 표시줄에서 표시 를 클릭한 다음 계획 시 충돌을 표시하기 를 선택합니다.
시나리오 충돌
충돌하는 작업 이름을 클릭하면 충돌하는 모든 물체가 하이라이트로 표시됩니다.
충돌 물체를 클릭하면 충돌 물체가 하이라이트로 표시됩니다.
포인트 클라우드 충돌
충돌하는 작업 이름을 클릭하면 충돌하는 모든 물체가 하이라이트로 표시됩니다.
충돌 부피 를 클릭하면 충돌한 포인트 클라우드가 하이라이트로 표시됩니다.
포인트 클라우드가 충돌할 때 충돌을 기록하기 하지 않으면 다른 충돌 물체만 하이라이트로 표시됩니다.
대상 물체 충돌
대상 물체가 충돌하면 대상 물체가 하이라이트로 표시됩니다.
계획 기록 설명¶
계획 성공¶
아래 그림과 같이 ①의 노드에는 실패한 자식 노드(②)가 포함되어 있지만 ③의 마지막 자식 노드는 성공적으로 계획되어 있으므로 ①의 노드는 성공적으로 계획되었다고 볼 수 있습니다.

로봇 자체 충돌¶

문제 원인: 계획 기록 결과에 로봇 자체 충돌 이 표시되며, 하위 노드를 통해 구체적인 원인을 확인할 수 있습니다. 현재 작업에서 이동_2 작업 중 로봇의 손목과 큰 팔 사이의 충돌을 볼 수 있습니다.
해결 방법: 자체 충돌을 방지하기 위해 로봇 관절 각도와 도구 자세를 조정합니다.
시나리오 물체와의 충돌¶
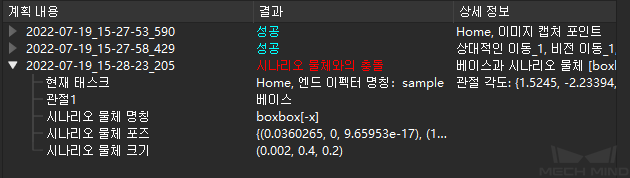
문제 원인: 계획 기록 결과에 따르면 자식 노드의 모든 실패 원인은 시나리오 물체와의 충돌 이며, 계획 내용에서 자식 노드를 확장하면 현재 작업에서 충돌 위치를 볼 수 있습니다. 이동_1 이동_2 동안 엔드 이펙터와 시나리오 모델이 충돌합니다.
해결 방법: 시나리오 모델과의 충돌을 피하기 위해 로봇 포즈 또는 도구 포즈를 조정합니다. 또는 충돌 모델 위치를 조정합니다.

포인트 클라우드 충돌 포인트 수가 제한을 초과함¶

문제 원인: 아래 이미지의 피킹 포즈를 시도할 때 충돌 포인트의 수가 142개로 설정된 역치(여기서 설정된 역치는 36)를 초과하고 충돌이 감지됩니다.

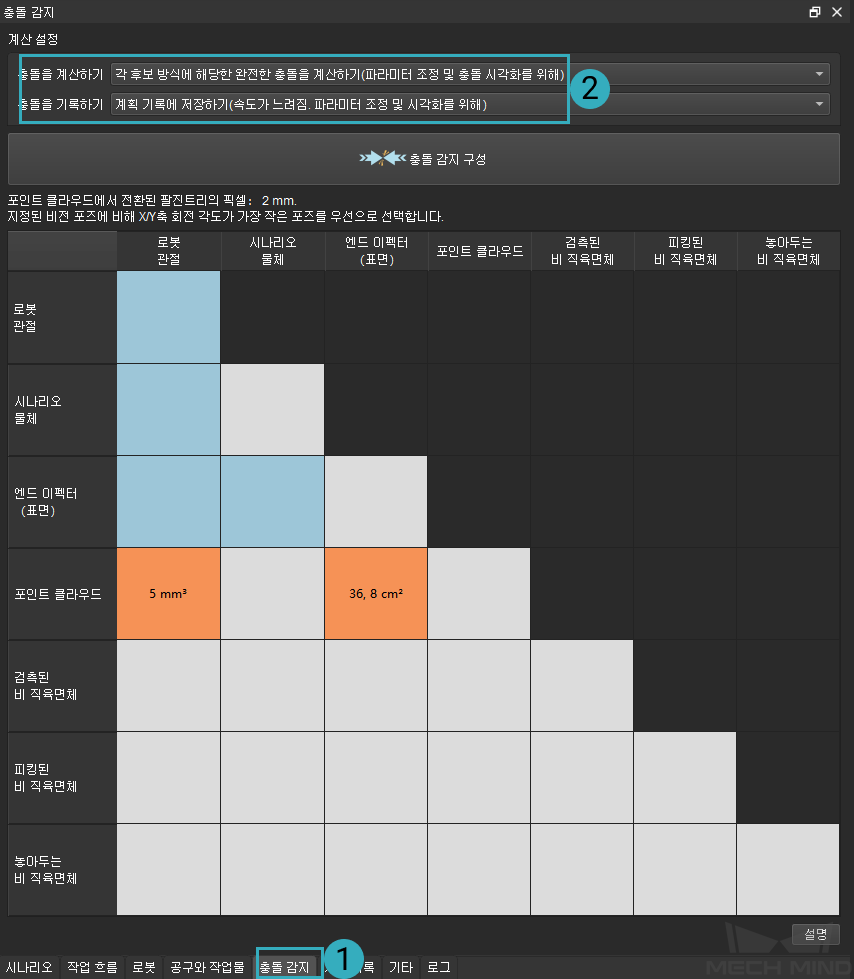
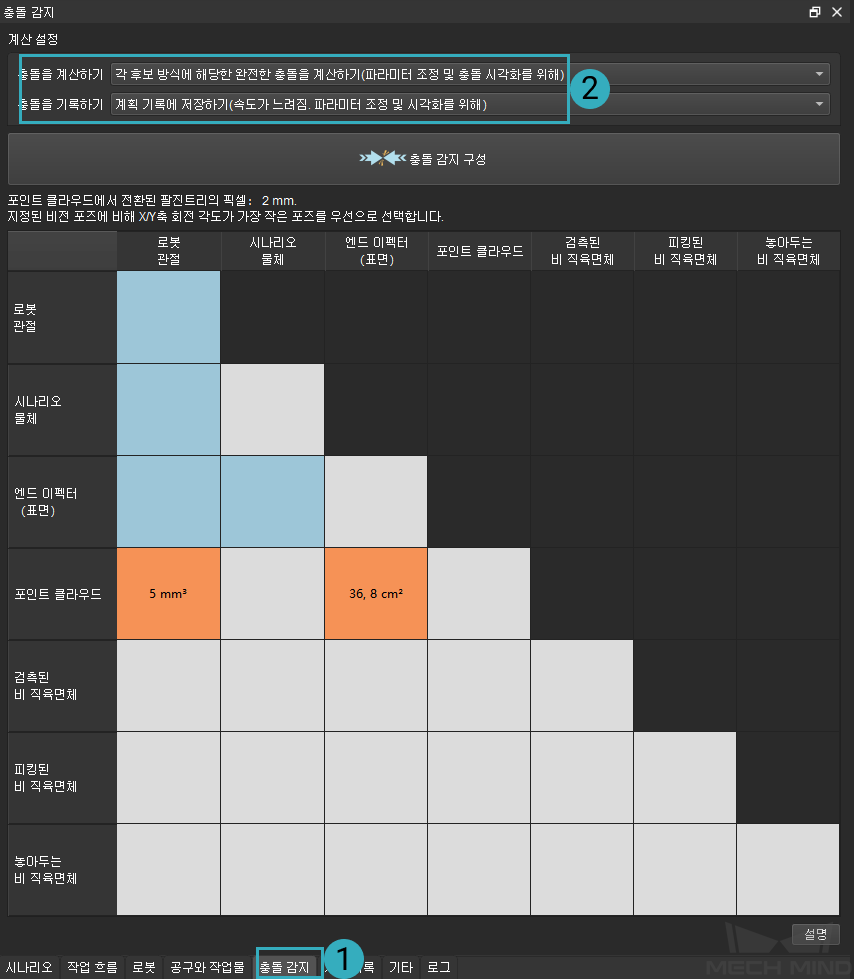
해결 방법: 리얼 로봇이 작업 과정에서 실제로 충돌하는지 관찰하고 충돌 감지 패널에서 충돌을 계산하기 및 충돌을 기록하기 를 각각 각 후보 방식의 완전한 충돌 접촉을 계산하기 및 계획 기록에 저장하기 로 선택한 다음 계획 기록 패널에서 특정 원인을 확인합니다. 또한 충돌 포인트의 역치, 픽 포인트, TCP 위치, 클램프 모델 위치 등을 조정할 수 있습니다.
포인트 클라우드 충돌 면적이 한계를 초과함¶
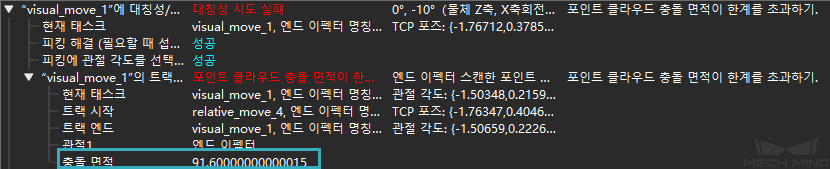
문제 원인: 위 사진의 피킹 포즈를 시도하려고 하면 충돌 면적이 91.60000000000015로 설정된 역치(여기서 설정된 역치는 8)를 초과하여 충돌이 감지됩니다.

해결 방법: 리얼 로봇이 작업 과정에서 실제로 충돌하는지 관찰하고 충돌 감지 패널에서 충돌을 계산하기 및 충돌을 기록하기 를 각각 각 후보 방식의 완전한 충돌 접촉을 계산하기 및 계획 기록에 저장하기 로 선택한 다음 계획 기록 패널에서 특정 원인을 확인합니다. 또한 충돌 면적의 역치, 픽 포인트, TCP 위치, 클램프 모델 위치 등을 조정할 수 있습니다.