2. 엔드 이펙터 구성¶
엔드 이펙터 모델을 추가하는 방법은 모델 추가 내용을 참조하십시오.
충돌 감지 과정에서 엔드 이펙터의 충돌 감지 기능이 기본적으로 활성화되어 있습니다. 주로 STL 및 OBJ 모델을 선택하고 해당 파라미터를 설정합니다.
STL 및 OBJ 모델 소개 내용을 통해 STL 및 OBJ 모델에 대해 알아보세요. 주로 포인트 클라우드의 충돌 감지에 대한 요구가 높은지(즉 클램프 내부의 포인트 클라우드의 충돌을 검출할 수 있는지)에 따라 모델 파일의 포맷을 선택하십시오.
STL
OBJ
충돌 감지 모델의 포맷
Mesh(삼각형 메시)
볼록다면체 조합(솔리드)
산업 드로잉
널리 사용됨
거의 사용되지 않음
충돌 감지 합리성
삼각형 메시 표면의 충돌(속이 비어 있음)만 검출할 수 있습니다.
요구가 엄격하고 효율성이 높음
파라미터 조절 적응성
복잡한 시나리오에서 파라미터를 조절하기 어렵습니다.
높은 적응성으로 파라미터를 손쉽게 조절할 수 있습니다.
2.1. STL 포맷¶
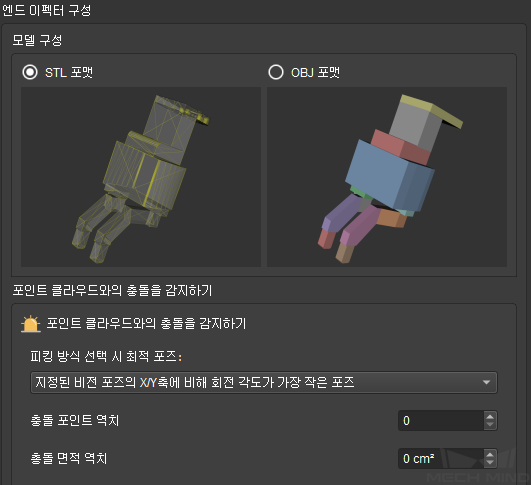
파라미터 설정:
충돌 포인트 역치:
기본값: 0설명: 피킹 시 모델 표면에서 충돌이 허용되는 포인트 클라우드의 수량.충돌 면적 역치:
기본값: 0설명: 포인트 클라우드가 한 경로에서 모델 표면 면적을 스쳐 지나가는 역치.피킹 방식 선택 시 최적 포즈:
지정된 비전 포즈의 X/Y축에 비해 회전 각도가 가장 작은 포즈: 비전 이동을 통해 획득한 포즈(순서가 정해짐)의 X/Y축에 비해 회전 각도가 가장 작은 포즈를 체크합니다.X/Y축 회전 범위 내 충돌이 가장 작은 포즈: X/Y축에 대칭성을 가진 모든 포인트 클라우드의 충돌을 감지하여 충돌 정도에 따라 가벼운 것에서 무거운 것으로 정렬합니다.
2.2. OBJ 포맷¶
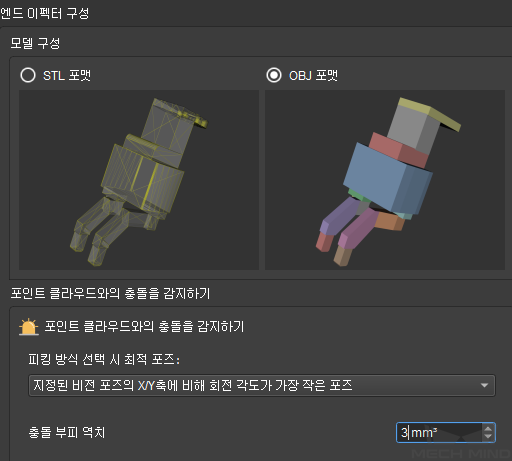
파라미터 설정:
충돌 부피 역치:
기본값:5설명: 충돌을 감지할 때 허용되는 엔드 이펙터와 포인트 클라우드 사이의 충돌 부피.피킹 방식 선택 시 최적 포즈:
지정된 비전 포즈의 X/Y축에 비해 회전 각도가 가장 작은 포즈: 비전 이동을 통해 획득한 포즈(순서가 정해짐)의 X/Y축에 비해 회전 각도가 가장 작은 포즈를 체크합니다.X/Y축 회전 범위내 충돌이 가장 작은 포즈: X/Y축에 대칭성을 가진 모든 포인트 클라우드의 충돌을 감지하여 충돌 정도에 따라 가벼운 것부터 무거운 것 순으로 정렬합니다.
2.3. 파라미터 조절에 관하여¶
충돌 감지를 고려할 때(특히 무작위로 배치된 부품을 피킹할 때) 부품을 피킹하는 과정에서 클램프가 다른 부품과 접촉하거나 다른 부품을 이동시킬 수 있는지를 고려해야 합니다.
젓가락으로 그릇에 담긴 콩을 집는 것으로 비유하자면, 젓가락으로 다른 콩을 집어들더라도 집으려고 하는 그 콩에 아무런 영향이 없을 것입니다. 이러한 경우에 충돌 감지의 역치를 더 크게(느슨하게) 설정하여 일부 충돌이 발생하도록 할 수 있으며, 이는 피킹 효율을 높일 수 있습니다. 또한 젓가락이 다른 콩을 치면 대상물도 움직일 수 있습니다. 크랭크 축과 같이 움직이지 못하는 물체를 피킹할 때 어떠한 충돌도 허용할 수 없으며 이때 충돌을 피하기 위해 충돌 감지의 역치를 줄여야 합니다.
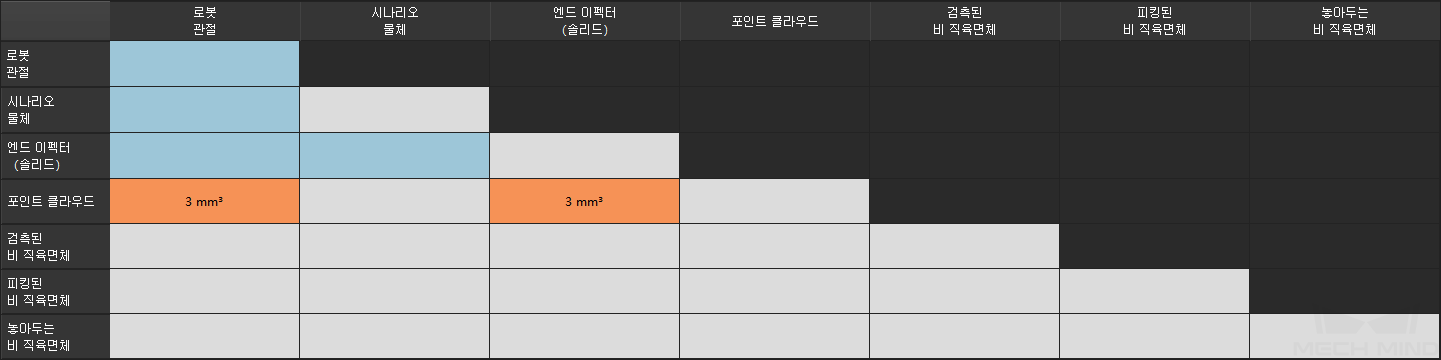
설정이 끝난 뒤 엔드 이펙터를 포함한 충돌 감지 시나리오를 획득합니다. 아래 그림과 같습니다.