엔드 이펙터 구성¶
대상 물체를 더 잘 피킹할 수 있도록 공구와 작업물 패널에서 엔드 이펙터를 구성할 수 있습니다. 이 부분에서 주로 다음과 같은 내용을 소개하겠습니다.
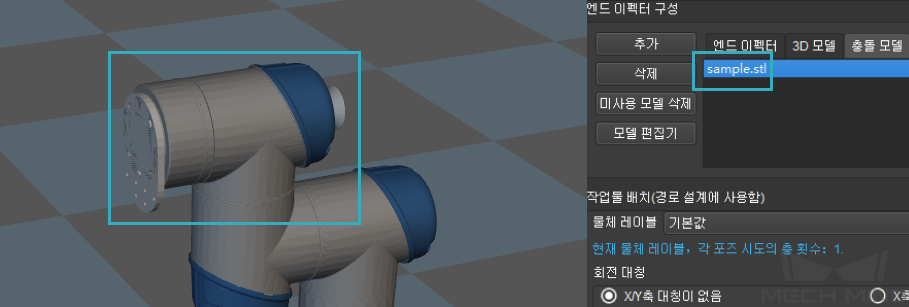
엔드 이펙터 구성 패널¶
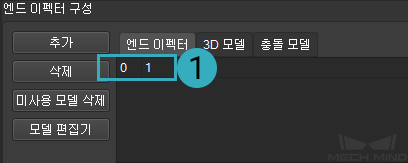
아래 그림과 같습니다.

패널에 있는 각 버튼 또는 옵션에 대한 설명은 아래와 같습니다.
엔드 이펙터: 이미 추가된 엔드 이펙터의 모델을 표시합니다.
3D 모델: 이미 추가된 3D 모델을 표시합니다.
충돌 모델: 이미 추가된 충돌 모델을 표시합니다.
추가: 엔드 이펙터, 3D 모델 또는 충돌 모델을 추가합니다.
삭제: 선택된 엔드 이펙터, 3D 모델 또는 충돌 모델을 삭제합니다.
미사용 모델 삭제: 사용하지 않은 3D 모델 또는 충돌 모델을 삭제합니다.
모델 편집기: 모델을 편집하고 단순화할 수 있습니다. 구체적인 내용은 모델 편집기 를 참조하세요.
힌트
여러 개의 엔드 이펙터를 추가한 경우 기본적으로 리스트의 첫 번째 모델을 사용합니다.
모델 추가¶
3D 모델 또는 충돌 모델을 추가하여 Mech-Viz에서 충돌 감지 및 경로 계획에 도움을 줄 수 있습니다.
3D 모델은 시각화에만 사용되며 충돌 모델은 시각화 뿐만 아니라 충돌 감지에도 사용될 수 있기 때문에 충돌 모델만 추가하는 것을 권장합니다.
로드할 시나리오 모델은 OBJ 포맷인 경우 출돌을 피하기 위해 우선 OBJ 포맷 충돌 모델 설명 내용을 참조하시기 바랍니다.
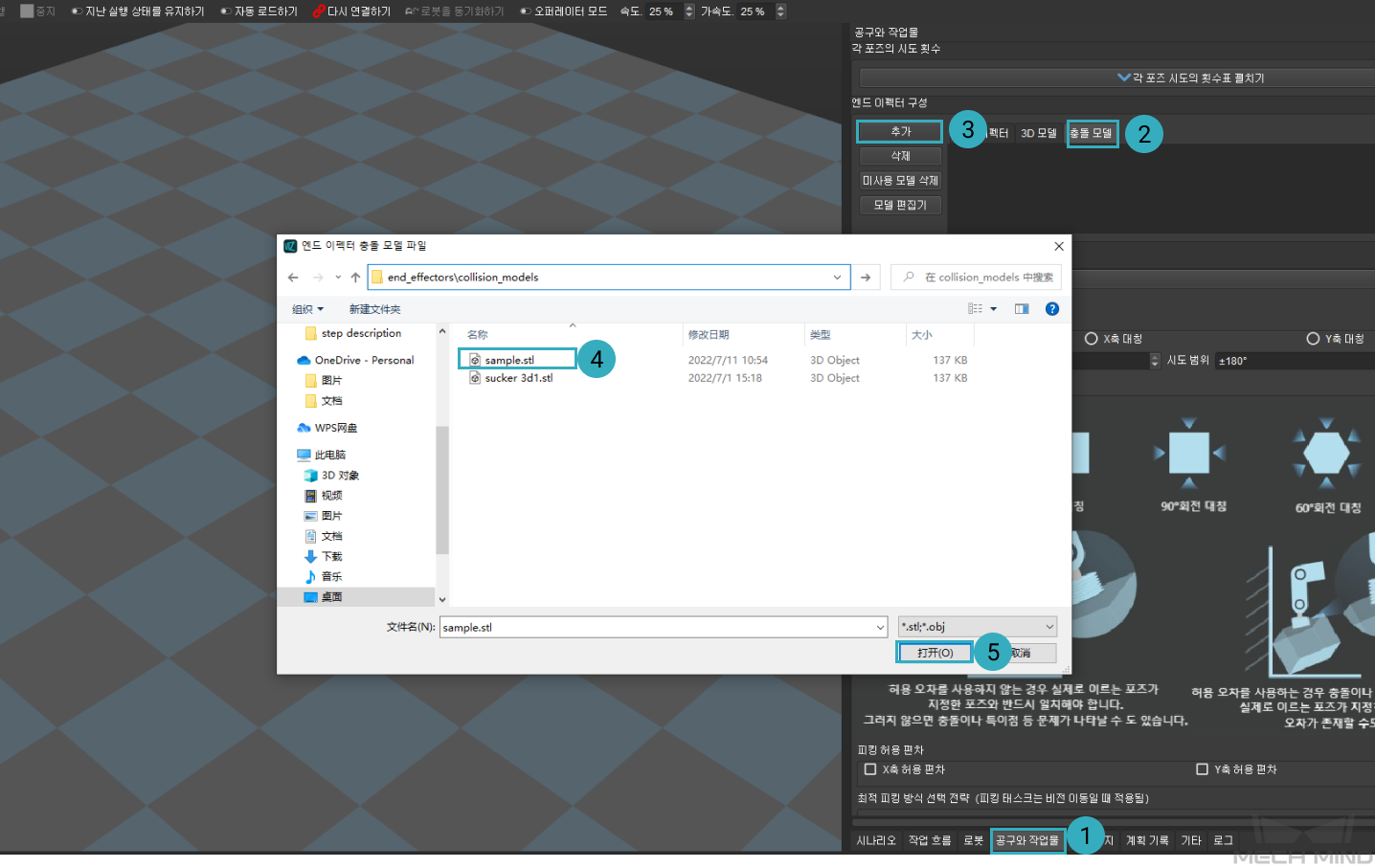
인터페이스에서 공구와 작업물 버튼을 클릭하여 엔드 이펙터 구성 패널로 들어갑니다. 다음으로 를 클릭하고 충돌 모델의 파일을 선택한 후 열기 를 클릭하십시오.
모델 유형
설명
완전히 볼록다면체로 구성된 OBJ 모델
정상적으로 로드하는 경우
비볼록면체가 포함된 OBJ 모델
"OBJ 모델 전환" 팝업창 알림
"OBJ 모델 전환" 팝업창 알림이 아래 그림과 같습니다. OK 버튼을 클릭하면 모델을 전환하고 로그할 것입니다. 전환 후의 모델 모양은 변할 수도 있습니다. OBJ 모델이 요구에 부합하도록 하기 위해 사용자는 Blender 혹은 Mech-Viz에 내장된 "모델 편집기" 기능을 통해 이런 모델을 처리해야 합니다.
OK 버튼을 클릭하면 모델을 전환하고 로그할 것입니다. 전환 후의 모델 모양은 변할 수도 있습니다. OBJ 모델이 요구에 부합하도록 하기 위해 사용자는 Blender 혹은 Mech-Viz에 내장된 "모델 편집기" 기능을 통해 이런 모델을 처리해야 합니다.충돌 모델 리스트에서 도입된 모델을 더블클릭하여 팝업된 모델 전환을 편집하기 창에서 파라미터를 조절합니다.
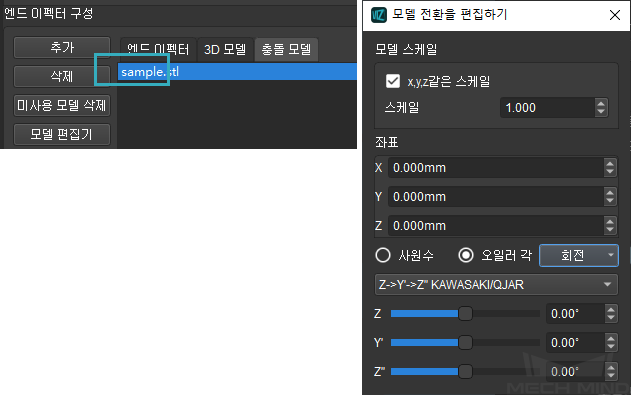
위 그림에서 표시된 바와 같이 각 파라미터를 조절함으로써 엔드 이펙터 모델을 구성할 수 있습니다. 이 팝업창의 주요 버튼과 옵션에 대한 설명은 아래와 같습니다.
모델 스케일: 모델 스케일을 설정하여 모델의 크기를 확대/축소할 수 있습니다. 스케일을 설정한 후의 효과는 아래 그림과 같습니다.
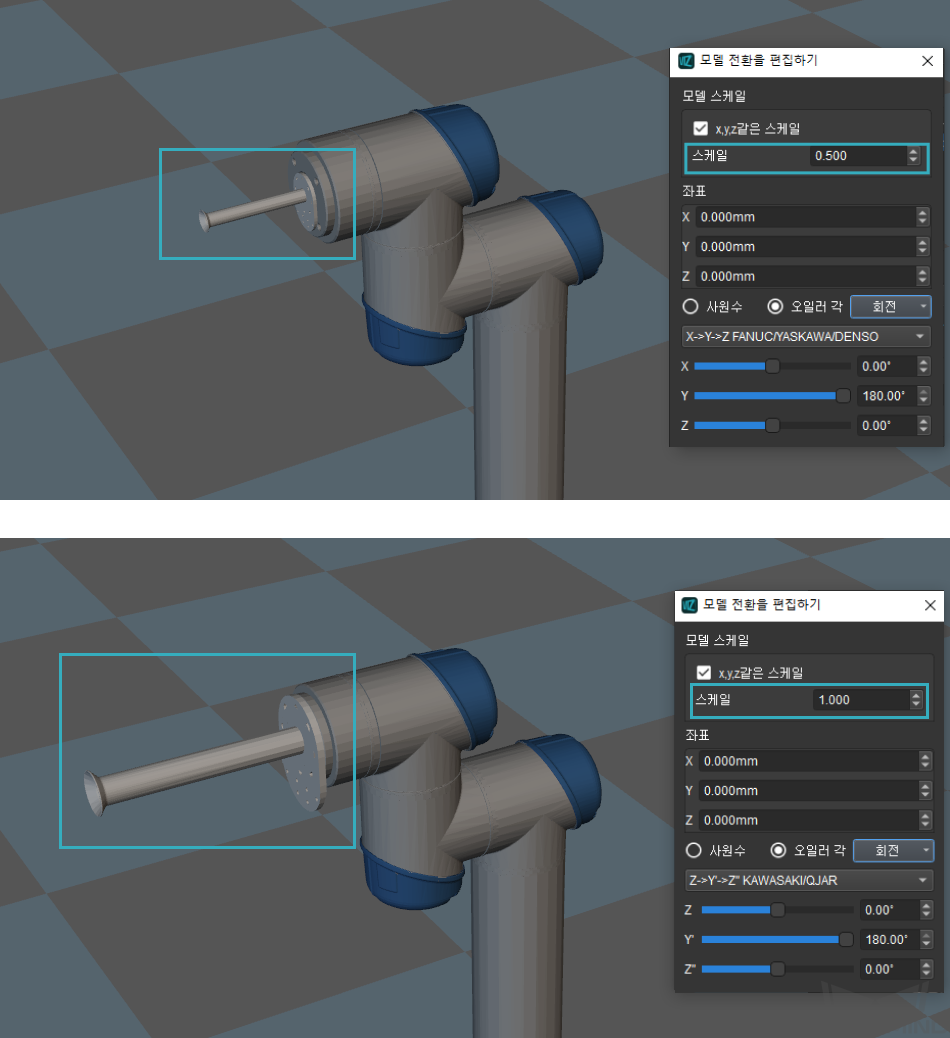
X,Y,Z 방향에서 각각 스켕일링 계수를 설정할 필요가 있으면 x,y,z같은 스케일 을 언체크하고 X,Y,Z 방향의 스케일링 계수를 각각 입력해야 합니다.

좌표: X,Y,Z 의 좌표값을 수정하여 로봇 플랜지를 기준으로 한 충돌 모델의 위치를 조정할 수 있습니다.
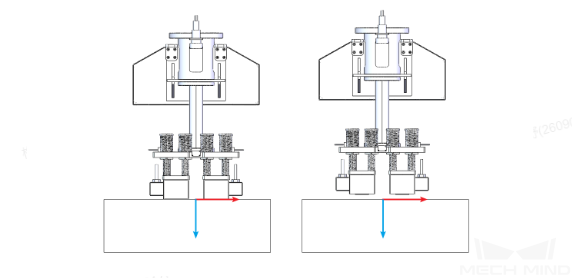
정확한 충돌 모델의 위치는 아래 그림과 같습니다.
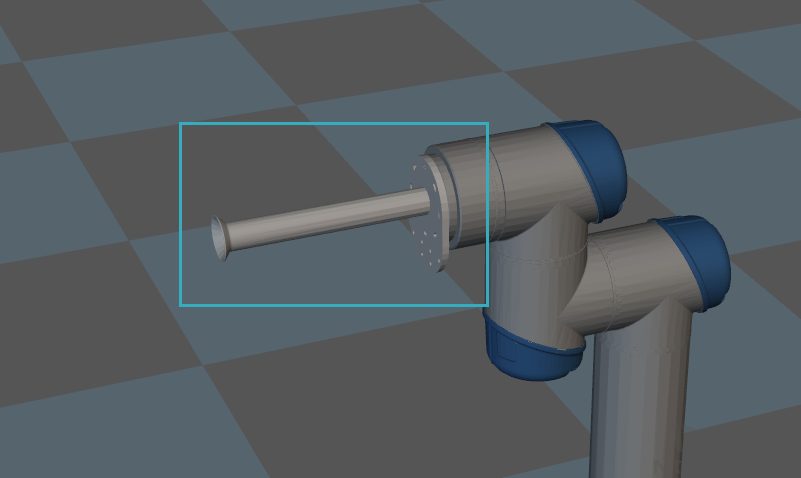
이미 추가된 충돌 모델 명칭을 클릭하면 해당 모델이 3D 시뮬레이션 구역에 나올 것입니다. 이때 모델 위치가 맞는지 확인하십시오. 아래 왼쪽 그림과 같이 충돌 모델이 로봇 모델과 겹치는 경우가 발생하면 위치가 잘못된 것입니다.
모델 편집 팝업창에서 X,Y,Z의 수치를 조절하거나 Z ,Y',X" 뒤의 슬라이드를 통해 충돌 모델의 위치를 조절할 수 있습니다. 효과는 아래 그림과 같습니다.
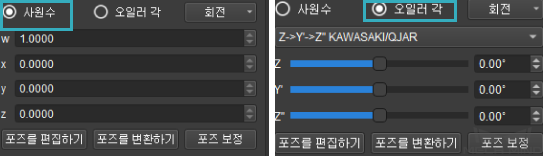
사원수, 오일러 각: 오일러 각 을 클릭하여 슬라이드를 통해 모델의 회전 각도를 설정할 수 있습니다. 이때 사원수인 경우에 관련 회전 파라미터를 확인하려면 사원수 를 클릭하십시오.
모델과 관련된 주의사항¶
특별한 디스플레이 요구가 없는 프로젝트에 대해 충돌 모델만 추가하고 3D 모델을 추가하지 않는 것을 권장합니다. 이유는 다음과 같습니다.
프로젝트 크기를 축소하기 위해 일반적으로 더 나은 디스플레이 효과를 위하여 3D 모델에 포함된 모델 상세 정보가 더 많고 크기가 더 큽니다.
작업을 간소화하기 위하여 클램프에 대해 옵셋을 설정해야 할 경우에 충돌 모델만 추가했을 때 한번만 설정하면 되고 3D 모델과 충돌 모델을 모두 추가했을 때 따로 설정해야 합니다.
설정한 모델 크기가 실제 크기보다 커야 합니다. 이유는 다음과 같습니다.
Mech-Viz에서 계획한 경로가 로봇의 실제 이동 경로와 차이가 있습니다.
클램프에 대해 가공&조립할 때 오차가 생길 수 있으므로 모델 크기가 실제 크기와 차이가 있을 수 있습니다.
모델 Z 방향의 길이가 실제 길이보다 작아야 합니다.
엔드 이펙터가 빨판이나 스프링 등 완충 장치가 있는 경우 도구의 Z방향은 일정한 압축이 있는 것을 허용합니다. 따라서 잘못된 충돌 감지 결과를 피하기 위해 모델 Z방향의 길이는 실제 길이보다 약간 작은 게 좋습니다.
참고
TCP 좌표계에서 일반적으로 클램프의 작업 방향(목표 방향)을 Z방향으로 정의하고 Z방향의 길이는 TCP에서 로봇 플랜지 표면까지의 거리를 가리킵니다.
모델 단순화.
모델 표면의 특징이 많을수록 충돌 감지를 진행할 때 계산량이 더 많습니다. 계산 속도를 높이기 위해 모델을 단순화하는 것을 권장합니다. 예를 들어 모델 내부에 충돌 감지를 할 필요가 없는 구조를 없애거나 평면으로 곡면을 대체할 수 있습니다.
모델 단순화의 구체적인 방법은 STL 모델 단순화 , OBJ 모델 단순화 내용을 참조하십시오.
엔드 이펙터를 구성하고 TCP를 조절하기¶
이미 추가한 충돌 모델을 기반으로 하여 엔드 이펙터 모델을 추가&구성하고 공구중심점(TCP)을 조정합니다.
공구중심점(TCP)은 엔드 이펙터의 끝점에 위치하여 피킹 등 작업을 수행하기 위해 로봇을 공간의 한 지점으로 이동시킬 때 사실은 공구중심점(TCP)을 해당 지점으로 이동시키는 것입니다.
엔드 이펙터 모델 구성¶
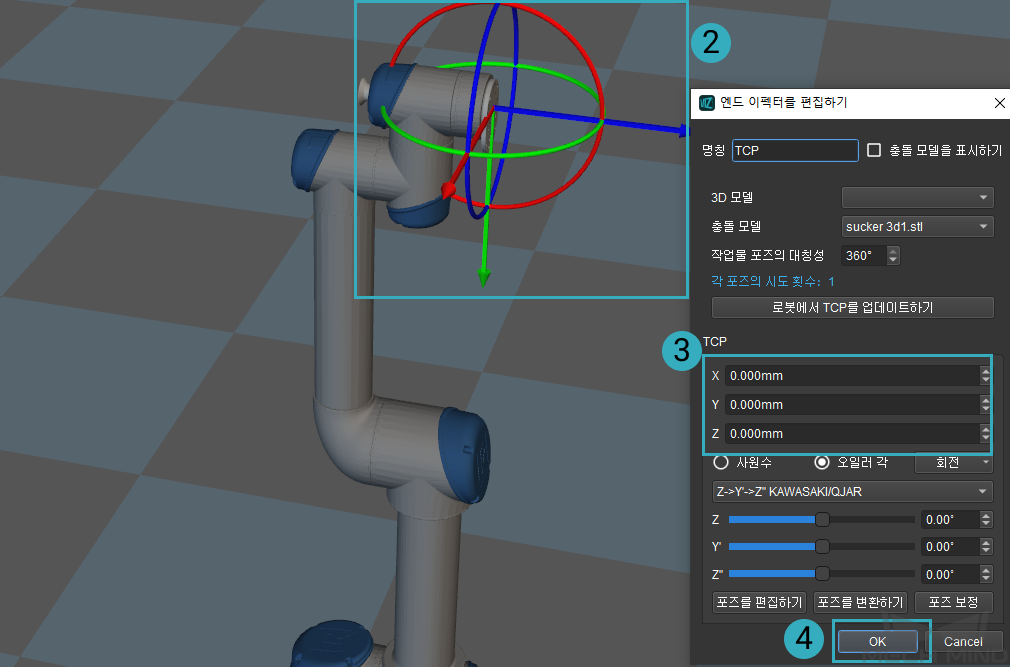
엔드 이펙터 구성 패널에서 엔드 이펙터 를 선택하고 추가 를 클릭하세요. 팝업 창 엔드 이펙터를 편집하기 에서 설정하고 OK 를 클릭하십시오.
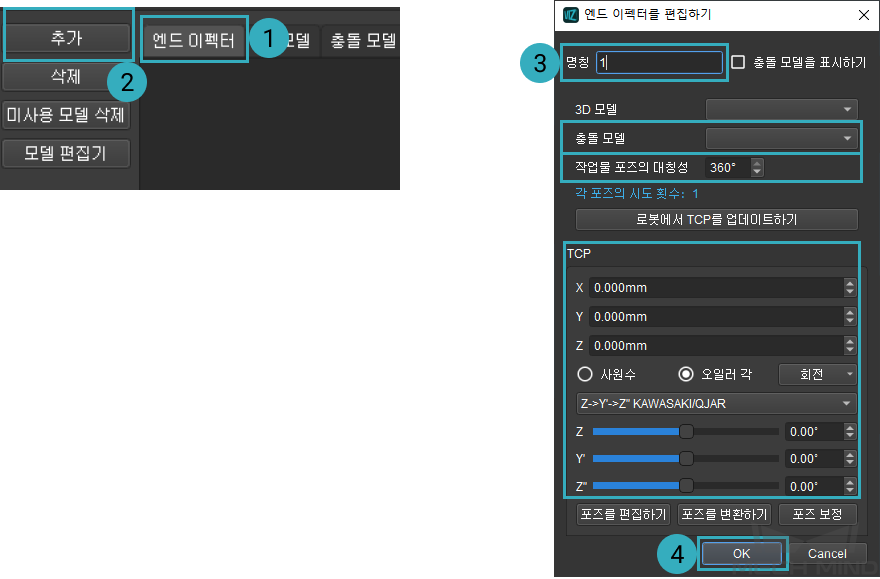
위 오른쪽 그림과 같이 엔드 이펙터를 편집하기 창의 주요 버튼과 옵션의 기능에 대한 설명은 아래와 같습니다.
명칭: 엔드 이펙터의 명칭을 설정합니다.
3D 모델: 풀다운 메뉴에서 도입된 3D 모델을 선택할 수 있습니다.
충돌 모델: 풀다운 메뉴에서 도입된 충돌 모델을 선택할 수 있습니다.
작업물 포즈 대칭성: 엔드 이펙터가 물체를 피킹하는 방식과 관련이 있습니다. 최적 피킹 포즈를 선택하는 데 사용되며 실제 상황에 따라 설정할 수 있습니다.
로봇에서 TCP를 업데이트하기: 리얼 로봇의 TCP를 Mech-Viz로 동기화합니다.
TCP: X,Y,Z의 값을 수정함으로써 엔드 이펙터를 기준으로 한 TCP의 위치를 조절할 수 있습니다. 조절한 후의 효과는 아래 그림과 같습니다.
사원수, 오일러 각: 오일러 각 을 클릭하여 슬라이드를 드래그함으로써 드래거(로봇 모델 말단에 있는 좌표구)의 회전 각도를 설정할 수 있습니다. 이때 사원수인 경우에 관련 회전 파라미터를 확인하려면 사원수 를 클릭하십시오.
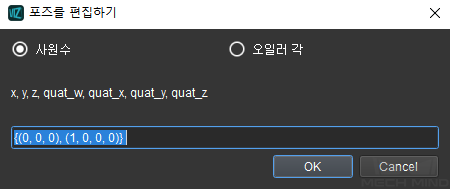
포즈를 편집하기: 구체적인 수치를 입력하여 모델 포즈를 편집합니다.
포즈를 변환하기: 자체 정의한 방식으로 현재 포즈를 새로운 포즈로 변환합니다.

효과는 아래 그림과 같습니다.
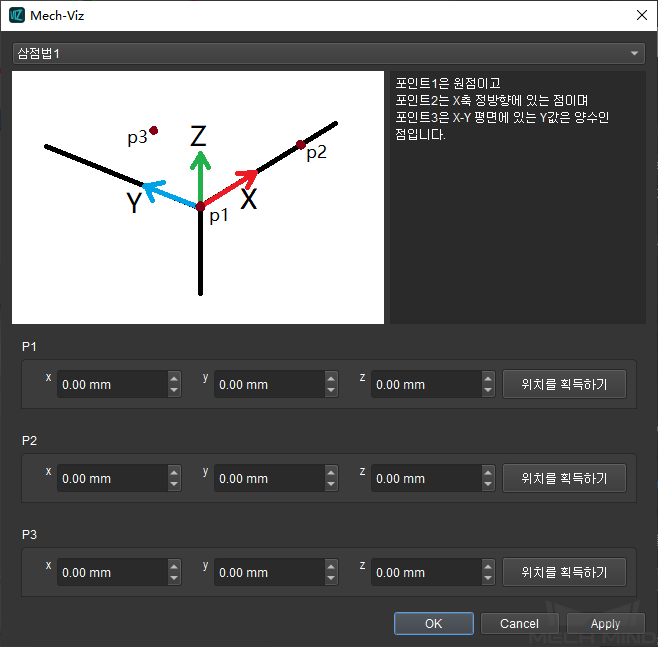
포즈 보정: 팝업창 제시에 따라 P1、P2 및 P3의 좌표를 설정하여 삼점법으로 TCP 포즈를 보정합니다.
TCP를 조절하기¶
엔드 이펙터 모델을 구성한 다음에 TCP의 위치를 조정해야 합니다.
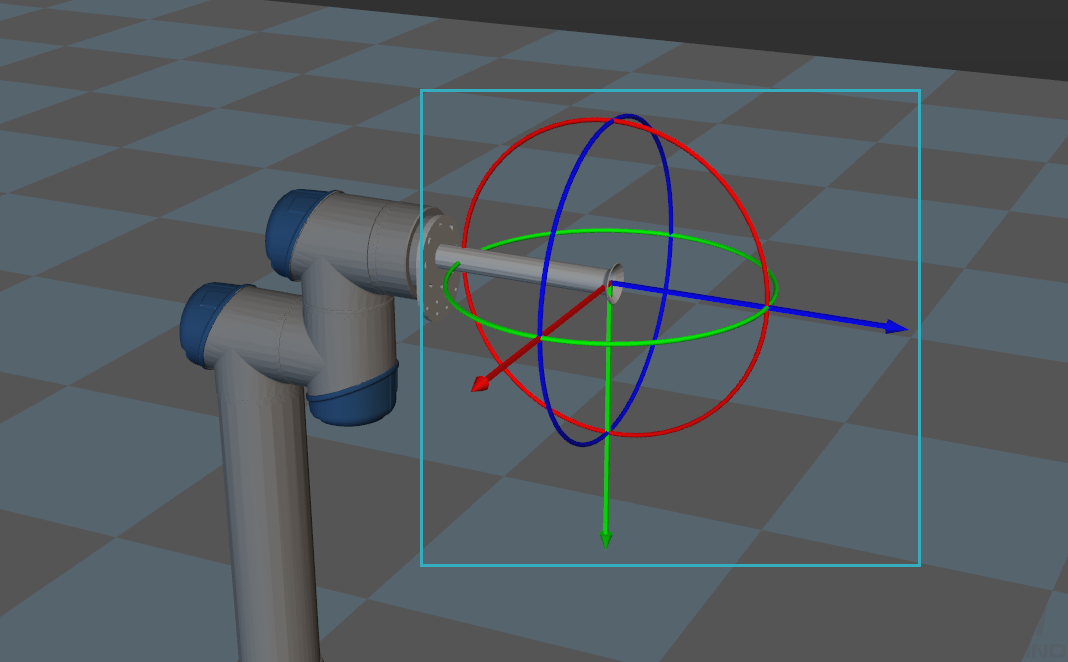
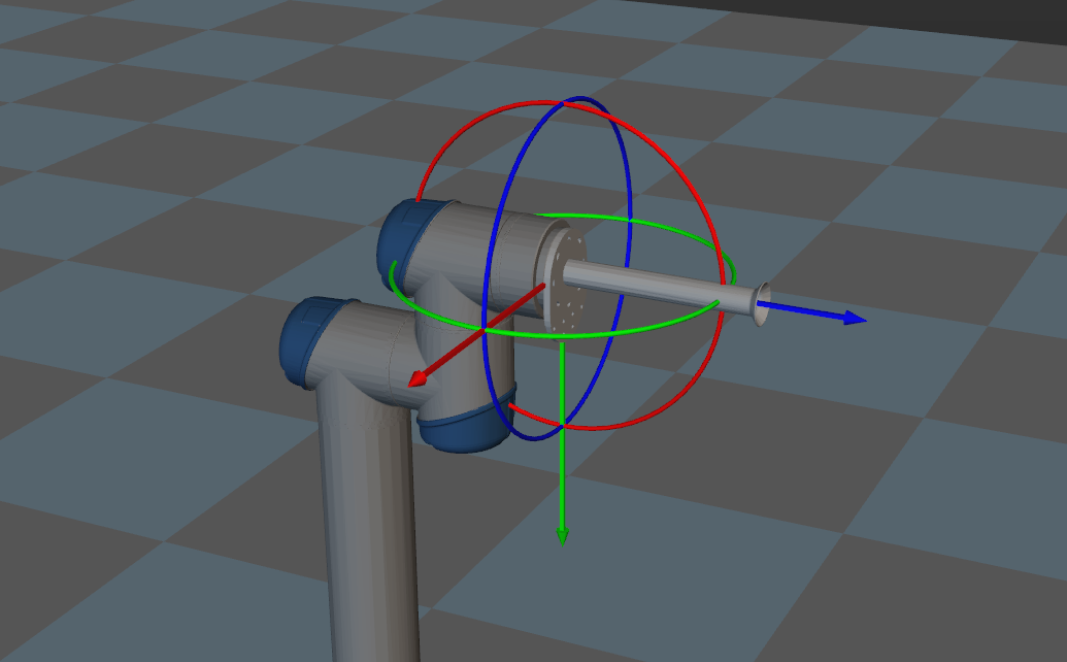
TCP는 드래거(로봇 모델 말단의 좌표구)의 중심점으로 표시되어 기본적인 TCP 상태는 아래 그림과 같습니다.
리스트에 있는 엔드 이펙터 명칭을 더블클릭하여 엔드 이펙터를 편집하기 화면으로 들어갑니다. TCP 의 파라미터를 조절하여 TCP를 엔드 이펙터 말단으로 이동시킵니다. 수정이 완료된 후 OK 를 클릭하십시오.
수정한 뒤의 TCP 위치는 아래 그림과 같습니다.