작업물 구성¶
일반적으로 실제 프로젝트에서 물체를 피킹하는 방식은 유일하지 않습니다. 피킹 가능한 포즈의 수를 늘리기 위해 작업물 구성 패널에서 회전 대칭, 피킹 허용 편차 등에 대해 설정할 수 있습니다. 이 부분에는 주로 다음과 같은 내용이 포함됩니다.
작업물 포즈 선택 전략 소개¶
작업물 포즈를 선택할 때 Mech-Vision과 Mech-Viz 프로젝트를 결합해야 하며 다음과 같은 두 가지 과정을 포함합니다.
Mech-Vision이 물체가 위치하는 평면의 높이, 물체의 경사도 등에 근거하여 물체의 포즈에 대해 필터링하고 순서를 배열합니다.
물체 포즈의 X,Y,Z 값에 근거하여 내림차순 또는 오름차순으로 순서를 배열합니다.
물체의 포즈와 기준 포즈 사이의 거리에 근거하여 물체 포즈에 대해 내림차순 또는 오름차순으로 순서를 배열합니다.
물체의 포즈와 기준 포즈 사이의 각도에 근거하여 무효한 포즈를 제거합니다.
충돌을 피하기 위해 Mech-Viz가 Mech-Vision에서 보내 온 포즈 리스트를 기반으로 물체의 대칭성, 피킹 허용 편차 등 요소를 고려해 물체 포즈에 대해 다시 선택합니다.
Mech-Vision에서 제공한 포즈 리스트의 순서에 따라 작업물 포즈를 선택합니다.
첫 번째 작업물 포즈를 사용하여 물체를 피킹하는 과정에서 충돌 위험이 감지되면 물체 대칭성과 피킹 허용 편차를 결합하여 사용자가 설정한 최적 피킹 방식 선택 전략에 따라 포즈를 선택합니다.
위에서 언급한 작업물 포즈를 모두 피킹하지 못하면 다음 피킹 포즈를 사용하여 시도하십시오.
작업물 구성 패널¶
메인 인터페이스의 오른쪽 밑에서 ① 공구와 작업물 을 클릭하여 작업물 구성 패널로 들어갑니다. 아래 그림과 같습니다.
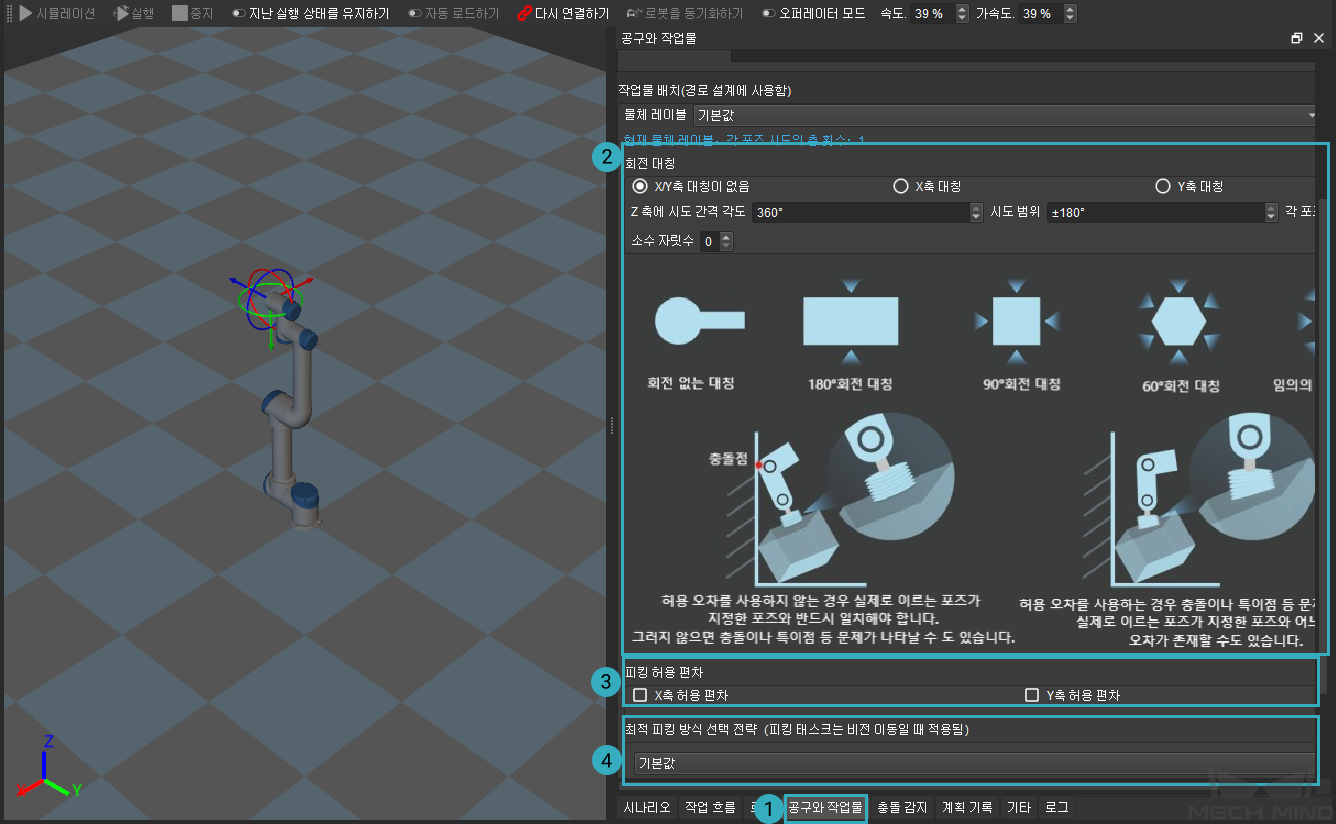
위 화면에서 ②에서 회전 대칭을 구성 하고 ③에서 피킹 허용 편차를 구성 하며 ④에서 최적 피킹 방식 선택 전략 을 설정합니다.
회전 대칭 구성¶
실제 프로젝트에서 대칭성을 갖는 물체를 자주 봅니다. 대칭성을 갖는 물체마다 각각의 대칭 각도 를 갖춥니다. 물체 혹은 작업물 포즈가 X/Y/Z 축을 중심으로 α° 를 회전한 뒤 물체의 자세가 회전하기 전과 같으면 이 각도 α°는 대칭 각도 라고 부릅니다. 예를 들어 정사각형의 대칭 각도는 90°, 직사각형의 대칭 각도는 180°, 정육각형의 대칭 각도는 60°, 원 또는 링의 대칭 각도는 임의의 각도입니다. 회전 대칭성을 갖지 않는 물체의 대칭 각도는 360° 입니다. 아래 그림과 같습니다.

로봇이 대칭 각도 에 근거하여 물체를 피킹하거나 배치할 때 다양한 방식을 선택할 수 있지만 결과는 똑같습니다. 회전 대칭 구성 패널에서 관련 파라미터를 설정할 수 있습니다. 아래 그림과 같습니다.

회전 대칭 구성 패널의 각 버튼과 옵션의 기능은 다음과 같습니다.
X/Y 축 대칭이 없음: 물체는 Z축에 대해서만 대칭입니다.
X 축 대칭: 물체가 X축을 중심으로 대칭을 이루는 경우 이 옵션을 선택하십시오.
Y 축 대칭: 물체가 Y축을 중심으로 대칭인 경우 이 옵션을 선택하십시오.
시도 간격 각도: X/Y/Z 축에 대한 대칭각도, 즉 대상 물체를 피킹할 때 로봇의 시도 간격입니다(단위:각도). 즉 로봇은 시도 범위 내에서 설정된 간격 각도에 근거하여 물체를 피킹할 것입니다. (예를 들어: 시도 간격 각도가 α°로 설정되면 로봇은 시도 범위 내에서 α°마다 피킹을 시도할 것입니다.)
시도 범위: 로봇은 이 범위 내에서 설정된 시도 간격 각도(대칭 각도)에 따라 이 범위 내에서 물체를 피킹합니다.
소수 자릿수: 대칭 각도와 시도 범위 수치의 소수 자릿수.
물체 대칭성 설정 방법¶
회전 대칭 구성 패널에서 X/Y 축 대칭이 없음 , X축 대칭 과 Y축 대칭 을 선택하십시오.
대칭 각도와 시도 범위에 필요한 수치의 소수 자릿수 를 설정하십시오.
대칭 각도 와 시도 범위 를 설정하십시오.

피킹 허용 편차 설정¶
피킹 허용 편차 는 작업물 포즈를 기준으로 한 허용 편차 입니다. 피킹 허용 편차 를 설정하면 로봇이 작업물을 피킹할 때 일정한 각도의 편차가 허용됩니다.
완충구역을 가진 엔드 이펙터가 X/Y 축을 중심으로 회전할 수 있거나 엔드 이펙터가 여러 각도로 대상 물체 자체를 피킹할 수 있는 경우에 피킹 허용 편차를 설정하면 엔드 이펙터와 상자 사이의 충돌 또는 싱귤래리티를 방지할 수 있습니다.
피킹 허용 편차 구성 패널은 아래 그림과 같습니다.

피킹 허용 편차 구성 패널의 각 버튼과 옵션의 기능은 다음과 같습니다.
X축 허용 편차: 물체를 피킹할 때 X축 방향에서의 허용 편차.
Y축 허용 편차: 물체를 피킹할 때 Y축 방향에서의 허용 편차.
X축 시도 간격 각도: X축에 대칭 각도, 즉 물체를 피킹할 때 로봇의 시도 간격입니다(단위:각도). 즉 로봇은 시도 범위 내에서 설정된 간격 각도에 근거하여 물체를 피킹할 것입니다. (예를 들어 시도 간격 각도가 α°로 설정되면 로봇은 시도 범위 내에서 α°마다 피킹을 시도할 것입니다.)
Y축 시도 간격 각도: Y축에 대칭 각도, 즉 물체를 피킹할 때 로봇의 시도 간격입니다(단위:각도). 즉 로봇은 시도 범위 내에서 설정된 간격 각도에 근거하여 물체를 피킹할 것입니다. (예를 들어 시도 간격 각도가 α°로 설정되면 로봇은 시도 범위 내에서 α°마다 피킹을 시도할 것입니다.)
시도 범위: 로봇은 이 범위 내에서 설정된 시도 간격 각도(대칭 각도)에 따라 이 범위 내에서 물체를 피킹합니다.
참고
피킹 허용 편차와 대칭성의 차이:
물체 대칭성: 대칭성을 가진 물체를 다양한 방향에서 피킹해도 결과가 동일합니다.
피킹 허용 편차: 엔드 이펙터와 물체의 특성으로 피킹할 때 일정한 편차가 존재할 수 있습니다.
회전 대칭을 설정한 다음에 피킹 허용 편차를 설정할 수 있습니다.
피킹 허용 편차는 동시에 두 방향에 대해 계획하지 않을 것입니다. X와 Y축 두 방향의 피킹 허용 편차가 동시에 존재하는 경우 하나만 계획합니다.
최적 피킹 방식 선택 전략¶
최적 피킹 방식 선택 전략 패널은 아래 그림과 같습니다. 선택할 수 있는 옵션은 기본값 , 최소 전역 회전 및 비전 포즈와의 최소 차이 가 있습니다.

각 옵션에 관한 설명은 아래와 같습니다.
기본값: 기본값 을 선택하면 자동으로 최소 전역 회전 전략을 사용합니다.
최소 전역 회전: 이 전략을 선택할 때 “피킹-배치” 전반 과정에서 우선으로 엔드 이펙터 Z축 회전이 가장 작은 포인트를 최적 작업물 포즈로 취급합니다. 이 전략의 장점은 로봇이 물체를 피킹한 후 불필요한 회전으로 인해 대상 물체가 떨어뜨리는 것을 피할 수 있습니다.
비전 포즈와의 최소 차이: 이 전략을 선택할 때 Mech-Vision 프로젝트에서 제공한 물체 포즈와의 각도 편차가 가장 작은 포즈를 최우선으로 선택할 것입니다. 예를 들어 포즈가 [0,0,0,15,0,0] 인 경우, 포즈의 Z축 대칭성을 60° 로 설정하면 우선으로 [0,0,0,75,0,0] 및 [0,0,0,-45,0,0] 의 포즈를 피킹할 것입니다.