충돌 감지 구성¶
다음과 같이 네 가지 구성을 포함합니다.
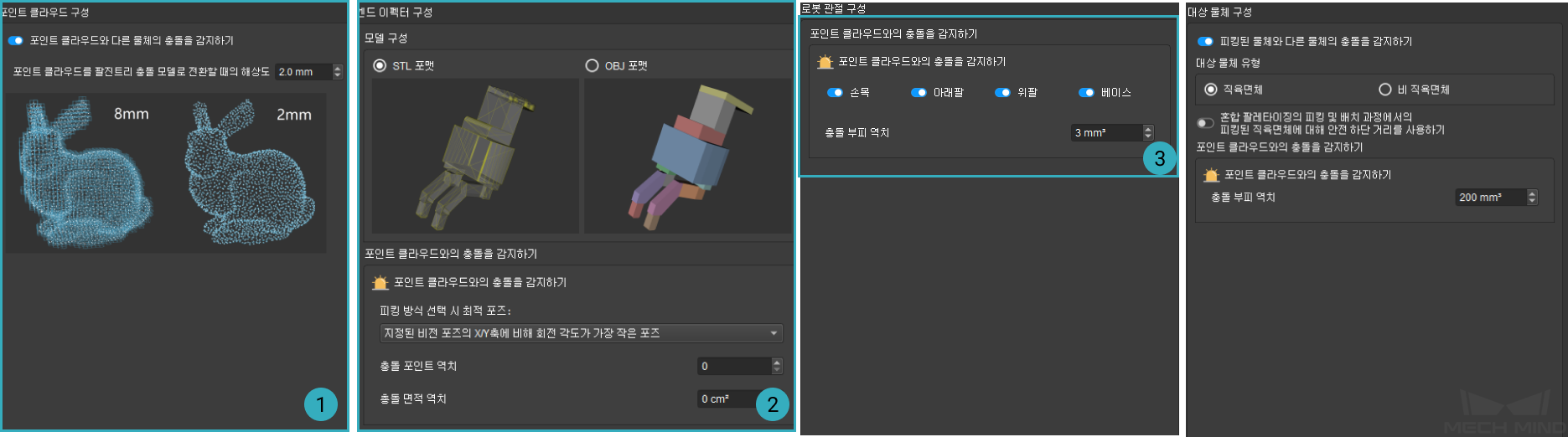
위에서 언급한 네 가지 구성 이외에 소프트웨어에서는 기본적으로 로봇 관절 사이의 충돌, 로봇 관절과 시나리오 물체 사이의 충돌, 로봇 관절과 엔드 이펙터(표면) 사이의 충돌, 시나리오 물체와 엔드 이펙터(표면) 사이의 충돌을 감지합니다. 위에 있는 네 가지 구성을 자세히 알아본 후 실제 수요에 따라 충돌 감지를 구성할 수 있습니다.
다음과 같이 네 가지 구성을 포함합니다.
위에서 언급한 네 가지 구성 이외에 소프트웨어에서는 기본적으로 로봇 관절 사이의 충돌, 로봇 관절과 시나리오 물체 사이의 충돌, 로봇 관절과 엔드 이펙터(표면) 사이의 충돌, 시나리오 물체와 엔드 이펙터(표면) 사이의 충돌을 감지합니다. 위에 있는 네 가지 구성을 자세히 알아본 후 실제 수요에 따라 충돌 감지를 구성할 수 있습니다.