1. 포인트 클라우드 설정¶
일반적으로 포인트 클라우드는 프로젝트에서 처리해야 할 물체를 의미합니다. 포인트 클라우드를 갖춘 충돌 감지를 진행하기 전에 Mech-Vision에서 포인트 클라우드를 외부 서비스로 보내기 스텝을 사용해야 합니다.
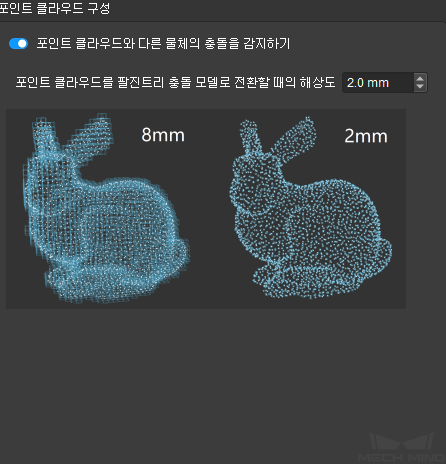
일반적으로 포인트 클라우드 자체는 충돌 감지 과정에 참여하지 않기 때문에 포인트 클라우드를 팔진트리(포인트 클라우드를 중심으로 하는 작은 정육면체)로 전환시켜야 합니다. 로봇 또는 클램프와 작은 정육면체 사이의 충돌이 발생하면 포인트 클라우드와 충돌한다는 것으로 간주합니다. 포인트 클라우드를 팔진트리 충돌 모델로 전환할 때의 해상도 를 수정함으로써 각 정육면체의 변 길이를 수정할 수 있습니다. 아래 그림과 같이 왼쪽은 해상도가 10mm인 경우이고 오른쪽은 2mm인 경우입니다. 포인트 클라우드 해상도의 크기를 적절하게 조정하여 정육면체를 포인트 클라우드에 더 잘 맞출 수 있고 포인트 클라우드의 충돌 감지 정확도를 높일 수 있습니다.

같은 포인트 클라우드에 대해
팔진트리의 해상도가 낮을수록 정육면체의 수가 많아지고 계산 결과의 정확성이 높아지는 동시에 소요된 시간이 길어집니다.
팔진트리의 해상도가 높을수록 정육면체의 수가 적어지고 계산 결과의 정확성이 낮아지는 동시에 속도가 더 빠릅니다.
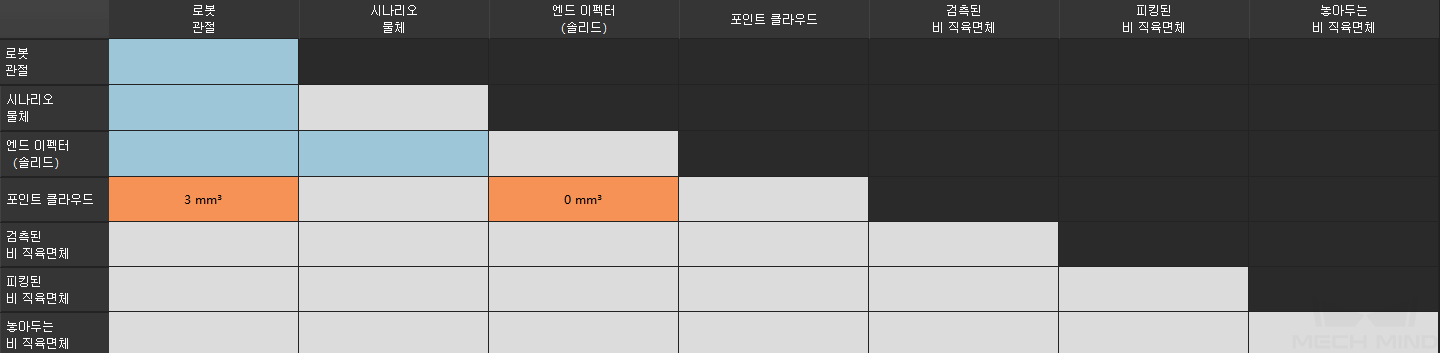
설정이 끝난 후 포인트 클라우드를 갖춘 충돌 감지 시나리오를 획득합니다. 기본적인 충돌 감지 뿐만 아니라 포인트 클라우드와 로봇 관절, 포인트 클라우드와 엔드 이펙터 사이의 충돌을 감지할 것입니다. 아래 그림과 같습니다.