포인트 클라우드를 외부 서비스로 보내기¶
기능 설명¶
포인트 클라우드를 Mech-Viz로 보냅니다.
응용 시나리오¶
포인트 클라우드를 Mech-Viz로 보내고 디버깅 혹은 실제 효과를 확인하는 데 사용됩니다.
입력 및 출력¶
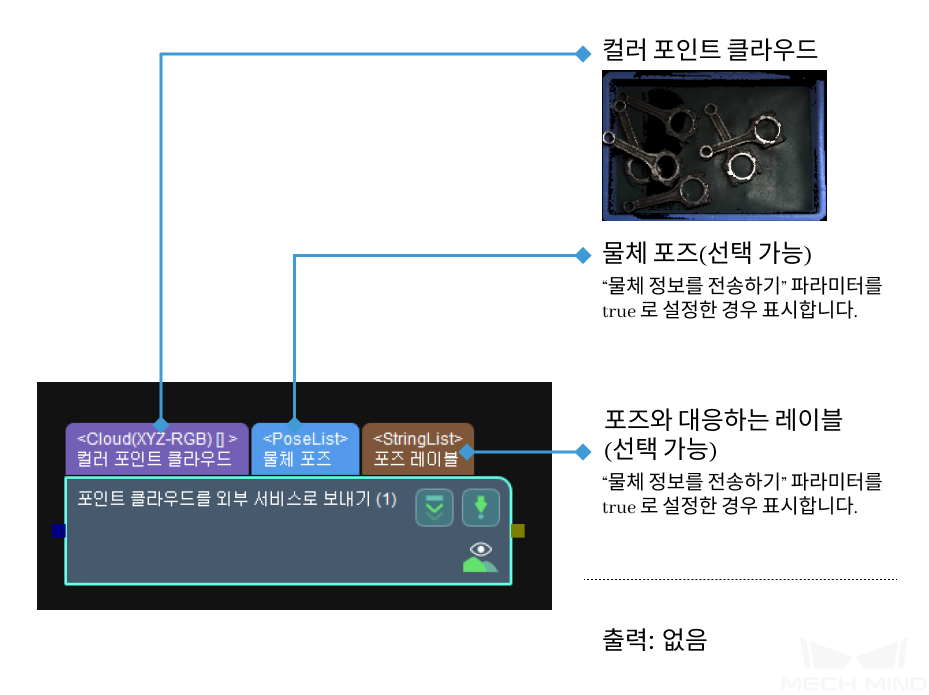
파라미터 설명¶
파라미터 |
파라미터 설명 |
|
포인트 클라우드 설명 |
입력된 포인트 클라우드의 유형 |
CloudXYZRGB:포인트 위치를 갖춘 컬러 포인트 클라우드입니다. CloudXYZ:포인트 위치를 갖춘 포인트 클라우드입니다. CloudXYZNORMAL:포인트 위치와 법선 벡터를 갖춘 포인트 클라우드입니다. |
물체 정보 설정 |
물체 정보를 전송하기 |
이 옵션을 선택하면 검출한 물체의 정보를 Mech-Viz에 보낼 것입니다. |
입력은 카메라 좌표계에 있는지 |
입력한 포인트 클라우드와 물체의 포즈가 카메라 좌표계에 있을 때 이 옵션을 선택하십시오. |
|
응용 예시¶
파라미터 조절 설명¶
포인트 클라우드 설정
- 입력된 포인트 클라우드의 유형
- 기본값: CloudXYZRGB(컬러 포인트 클라우드)값 리스트: CloudXYZRGB(기본값, 컬러 포인트 클라우드), CloudXYZ(포인트 클라우드), CloudNORMAL(법선을 갖춘 포인트 클라우드).설명: 실제 수요에 따라 보낼 포인트 클라우드 유형을 선택하십시오.예시: CloudXYZRGB, CloudXYZ , CloudNORMAL를 선택했을 때 입력한 포인트 클라우드의 유형은 각각 아래 그림과 같습니다.



물체 정보 설정
- 물체 정보를 전송하기
- 기본값: 선택하지 않음.설명: 선택하지 않으면 물체 포즈 와 포즈 레이블 포트가 표시되지 않습니다. 선택하면 물체 포즈 와 포즈 레이블 포트가 표시됩니다. 실제 수요에 따라 물체 포즈 와 포즈 레이블 을 보낼지를 선택하십시오. 아래 그림①은 선택하기 전의 효과이고 그림②는 선택한 후의 효과입니다.

입력은 카메라 좌표계에 있는지
기본값: 선택함.설명: 포인트 클라우드와 포즈가 카메라 좌표계에 있을 때 이 옵션을 선택하면 입력한 포인트 클라우드 정보는 로봇 좌표계로 전환되어 Mech-Viz로 보내게 됩니다. 선택하지 않으면 입력한 포인트 클라우드 정보는 직접 Mech-Viz로 보내게 됩니다.