3. 로봇 관절 구성¶
충돌 감지 과정에서 로봇 관절의 충돌 감지 기능이 기본적으로 활성화되어 있습니다. 로봇 관절 구성은 주로 로봇 관절과 포인트 클라우드 사이의 충돌을 감지할 때의 파라미터를 설정합니다.

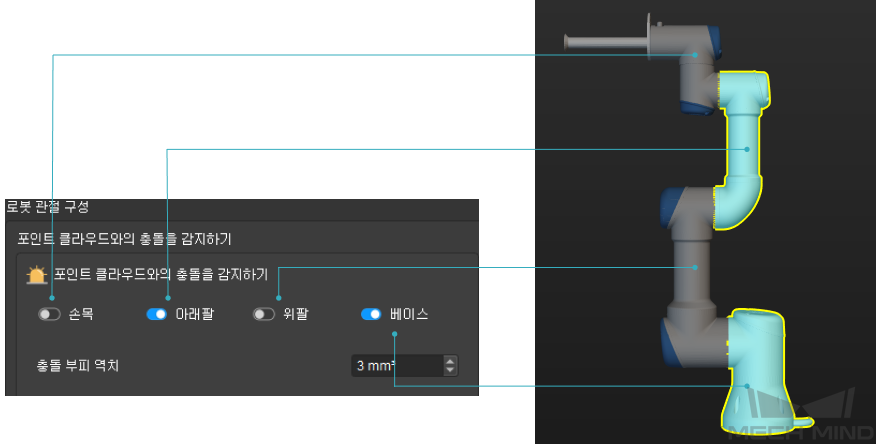
로봇은 손목,아래팔,위팔과 베이스 네 가지 부분으로 구성됩니다. 충돌 감지에 필요한 부분을 선택하여 선택된 부분은 아래 그림에서 표시된 바와 같이 하이라이트로 표시될 것입니다.
충돌 부피 역치
기본값:3설명: 충돌 감지를 할 때 허용되는 로봇과 포인트 클라우드가 충돌하는 부피입니다. 로봇은 STL 모델 포맷으로 모델 표면과 포인트 클라우드 사이의 충돌만 감지합니다. 따라서 여기서 말하는 충돌 부피는 로봇 모델 표면과 복셀 사이의 충돌 포인트 수 곱하기 복셀 부피 의 계산 결과입니다.