평면 포인트 클라우드의 포즈와 크기를 계산하기¶
응용 시나리오¶
보통 상자,마대 등 평면 포인트 클라우드의 픽 포인트 및 사이즈를 계산합니다.
팁
이 스텝을 사용하기 전에 노이즈가 결과에 미칠 영향을 줄이기 위해 포인트 클라우드에 대해 필터링, 클러스터링 단계를 먼저 진행해야 합니다.
입력 및 출력¶
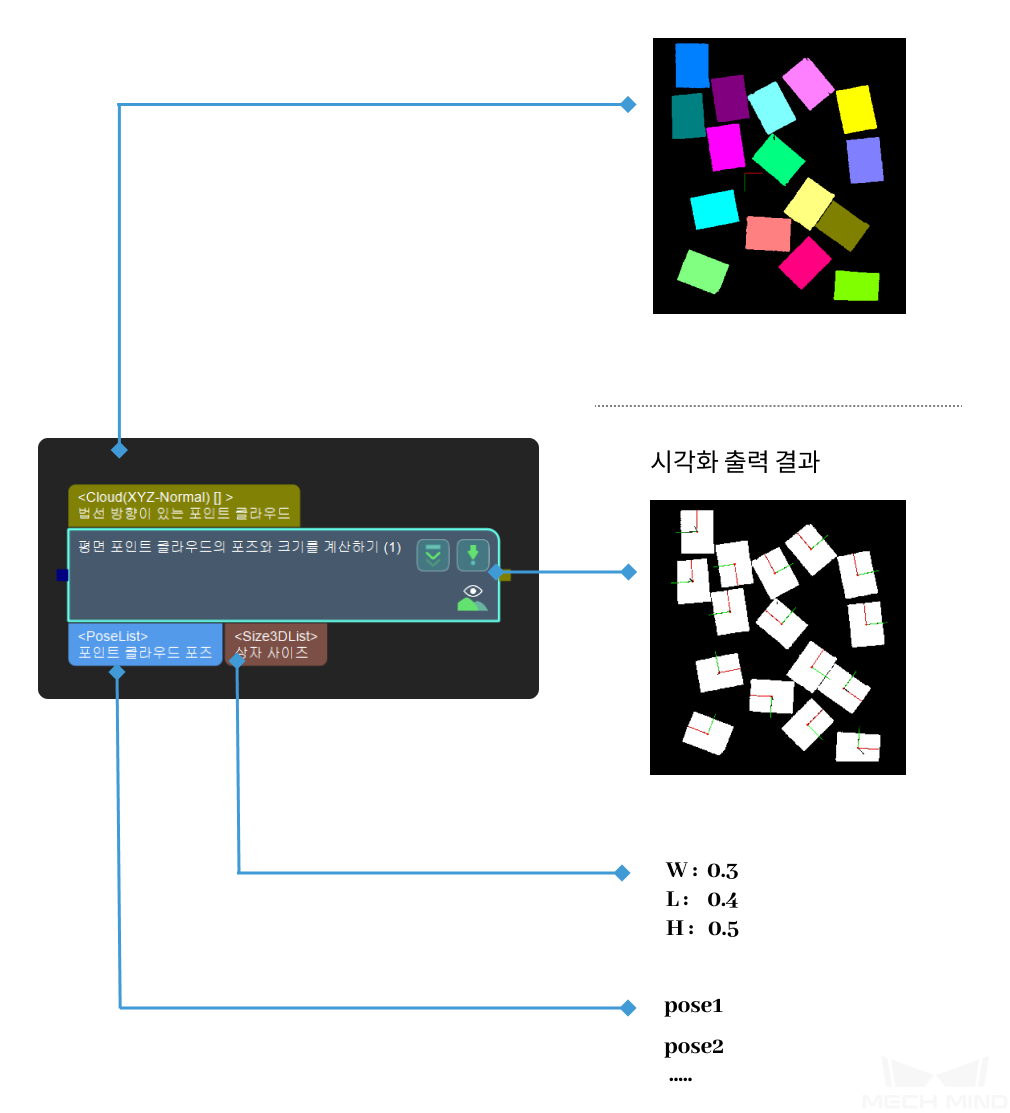
파라미터 설명¶
파라미터 |
파라미터 설명 |
||
포즈 계산 설정 |
포즈 중심 계산법 |
BoundingRectCenter |
포인트 클라우드 경계 박스의 중심점을 포즈의 위치 좌표로 사용합니다. |
CloudCenter |
포인트 클라우드의 중심점을 포즈의 위치 좌표로 사용합니다. |
||
포즈 자세 계산법 |
BoundingRectOrientation |
포인트 클라우드의 자세를 포즈의 자세로 사용합니다. |
|
CloudOrientation |
포인트 클라우드 주요 요소의 자세를 포즈의 자세로 사용합니다. |
||
물체의 윤곽선과 정렬된 외접 직사각형을 사용하기 |
외접 직사각형은 가능한 한 물체의 윤곽선과 정렬되어야 합니다. |
||
검색 반경 조정 |
외접 직사각형과 물체 윤곽선이 정렬될 때의 검색 반경 |
||
상자 포즈 계산 설정 |
상자 높이를 계산하기 |
물체의 Z방향 길이를 계산할 때만 이 옵션을 선택합니다. |
|
고정한 상자 하단 높이 |
상자 Z방향 길이를 계산하는 데 사용되는 머니퓰레이터 좌표에 있는 배경의 높이. |
||
응용 예시¶
파라미터 조절 설명¶
포즈 계산 설정
- 포즈 중심 계산법
- 기본값: BoundingRectCenter값 리스트: BoundingRectCenter , CloudCenter설명: 포인트 클라우드 경계 박스의 중심점 또는 포인트 클라우드의 중심점을 포즈의 위치 좌표로 사용하도록 선택할 수 있습니다. 물체 포인트 클라우드의 분포가 고르지 않은 경우(아래 왼쪽 그림과 같이) CloudCenter 방식을 선택하여 포즈의 중심점을 계산하고, 분포가 비교적으로 고른 경우(아래 오른쪽 그림과 같이) BoundingRectCenter를 선택하여 포즈 중심점을 계산합니다.

- 포즈 자세 계산법
- 기본값: BoundingRectOrientation값 리스트: BoundingRectOrientation , CloudOrientation설명: 포인트 클라우드 경계 박스의 자세 또는 포인트 클라우드의 주요 요소의 방향을 포즈의 자세로 사용하도록 선택할 수 있습니다. 물체 포인트 클라우드의 분포가 고르지 않은 경우(위 왼쪽 그림과 같이) CloudOrientation 방식을 통해 포즈의 중심점을 계산하고, 분포가 비교적으로 고른 경우(위 오른쪽 그림과 같이) BoundingRectOrientation 방식을 통해 포즈 중심점을 계산합니다.
힌트
포인트 클라우드 주요 요소의 방향은 바로 포인트 클라우드 법선의 방향입니다.
- 물체의 윤곽선과 정렬된 외접 직사각형을 사용하기
- 기본값: 선택하지 않ㅇ설명: 외접 직사각형은 가능한 한 물체의 윤곽선과 정렬되어야 합니다.
- 검색 반경 조정
- 기본값: 3설명: 외접 직사각형과 물체 윤곽선이 정렬될 때의 검색 반경입니다.
상자 포즈 계산 설정
- 상자 높이를 계산하기
- 기본값: 선택하지 않ㅇ설명: 물체의 Z방향 길이를 계산할 때만 이 옵션을 선택합니다.
- 고정한 상자 하단 높이
- 기본값: 0설명: 상자 Z방향 길이를 계산하는 데 사용되는 머니퓰레이터 좌표에 있는 배경의 높이. 일반적으로