출력¶
기능 설명¶
현재 프로젝트의 출력 결과를 백그라운드 서비스로 보냅니다.
응용 시나리오¶
각종 비전 프로젝트의 출력 결과를 서비스를 통해 Mech-Viz 혹은 Mech-Center로 보냅니다.
파라미터 설명¶
파라미터 |
파라미터 설명 |
|
포트 유형 |
Predefined |
개발자가 미리 정의한 포즈를 사용합니다. |
Dynamic |
사용자가 포트를 자체 정의할 수 있습니다. |
|
사용자 자체 정의한 포트 명칭 |
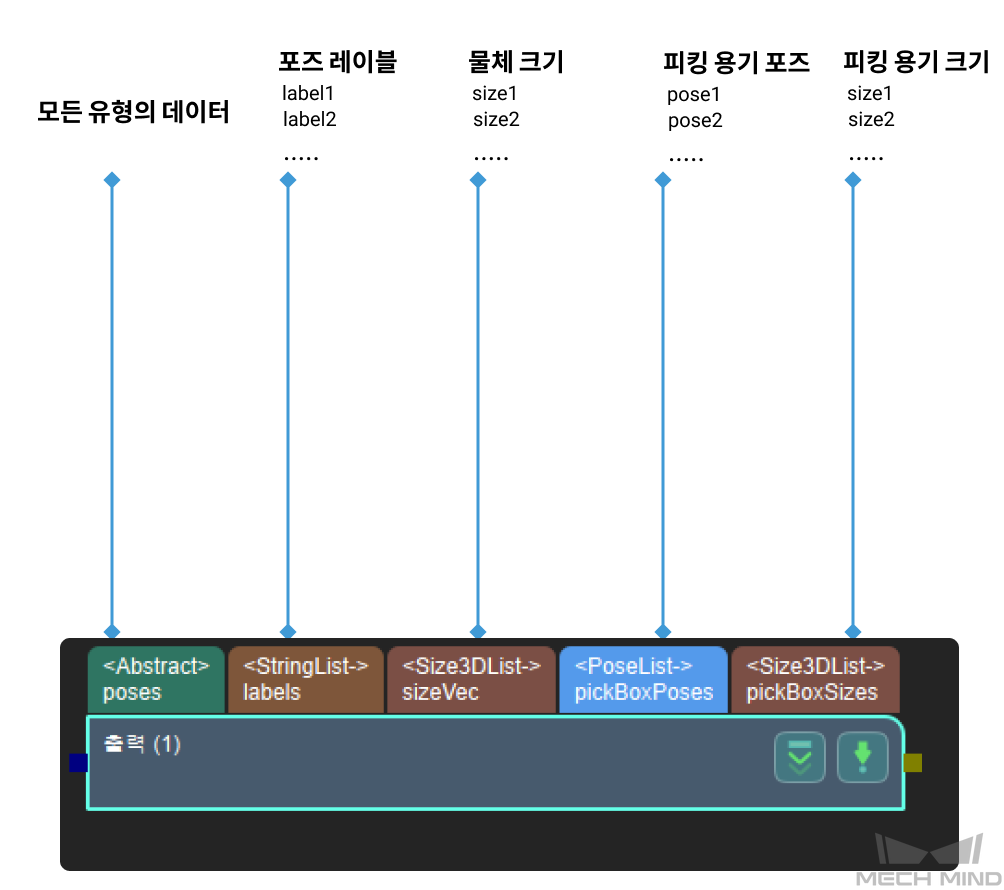
poses |
인식된 물체 포즈의 배열. |
labels |
물체 레이블 배열. |
|
sizes |
물체 3D 크기 배열. |
|
offsets |
물체 픽 포인트 옵셋 포즈의 배열. |
|
objectIndexes |
물체 인덱스 배열 |
|
pickBoxPoses |
상자의 포즈 배열. |
|
pickBoxSizes |
상자의 3D 사이즈 배열. |
|
응용 예시¶
파라미터 조절 설명¶
- 포트 유형
- 기본값: 미리 정의(Predefined)값 리스트: 미리 정의(Predefined), 동적(Dynamic)설명: 미리 정의(Predefined)를 선택하면 지난 스텝의 출력 유형은 미리 정의된 모드의 입력 유형과 대응합니다. 동적(Dynamic)을 선택하면 지난 스텝에서 지정한 출력 유형을 출력합니다.
- 사용자 자체 정의한 포트 명칭
- 설명: 외부 통신 장치에 출력하는 데이터 유형을 설정하는 데 사용됩니다.
Mech-Viz와 통신할 때
poses:인식된 물체 포즈의 배열. 예:[[1,1,0,5,1,0,0,0]]. 필수.
labels:물체 레이블 배열. 예: [“빅”,“스몰”]. 길이: poses와 같거나 0입니다. 선택 가능.
sizes:물체 3D 크기 배열. 예: [[0,4,0,2,0,1,]]. 길이: poses와 같거나 0입니다. 선택 가능.
offsets:물체 픽 포인트 옵셋 포즈의 배열. 물체 좌표계에서 정의됩니다. 길이: poses와 같거나 0입니다. 선택 가능.
objectIndexes:물체 인덱스 배열. 예: [0,1,0,2]. 길이: poses와 같거나 0입니다. 선택 가능.
pickBoxPoses:상자의 포즈 배열. 첫 번째는 상자이고 나머지는 상자 측벽(boxface-1 등으로 명명됨)입니다. pickBoxSizes와 비슷합니다. 선택 가능.
pickBoxSizes:상자의 3D 사이즈 배열. 길이가 pickBoxPoses보다 작으면 사이즈가 업데이트되지 않을 것입니다. 선택 가능.