4. 把持対象物設定¶
把持対象物は、対象物を転送する過程で衝突を検出するために使用されます。これは主に以下の2種類があります。
4.1. 直方体¶
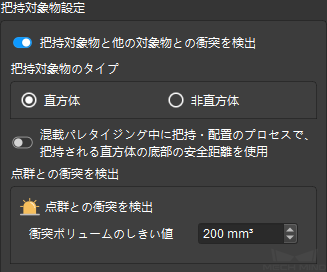
直方体モデルの追加方法:
Mech-Visionで 長方形の寸法と位置姿勢を計算 、 平面点群の位置姿勢とサイズを計算 、 対象物の寸法を読み込む を使用して対象物の寸法を計算し、 出力 を通じて計算結果をMech-Vizに送信すれば、Mech-Vizは対応する衝突モデルを自動的に生成することができます。
直方体の底部の安全距離:
調整説明:直方体対象物の設定には、安全の底部距離を設定する機能があります。下図に示すように、これは、把持された箱の衝突モデルの底部を厚くして、より安全な経路を選択することにより、箱が移動中に配置された箱と衝突するのを回避するために使用されます。現在、この機能は 混載パレタイジング にのみ使用されており、オンにする必要があります。パラメータ設定:オプション 混載パレタイジングの把持と配置中に把持された直方体の底部の安全距離を使用 をオンにし、 直方体の底部の安全距離 (推奨値は80mm-120mm)を設定します。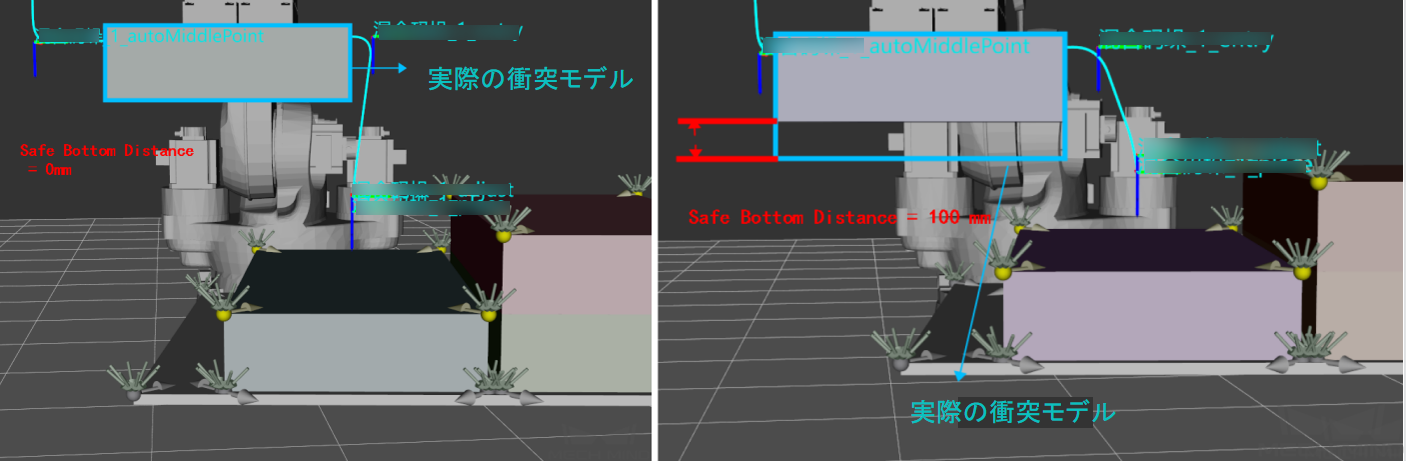
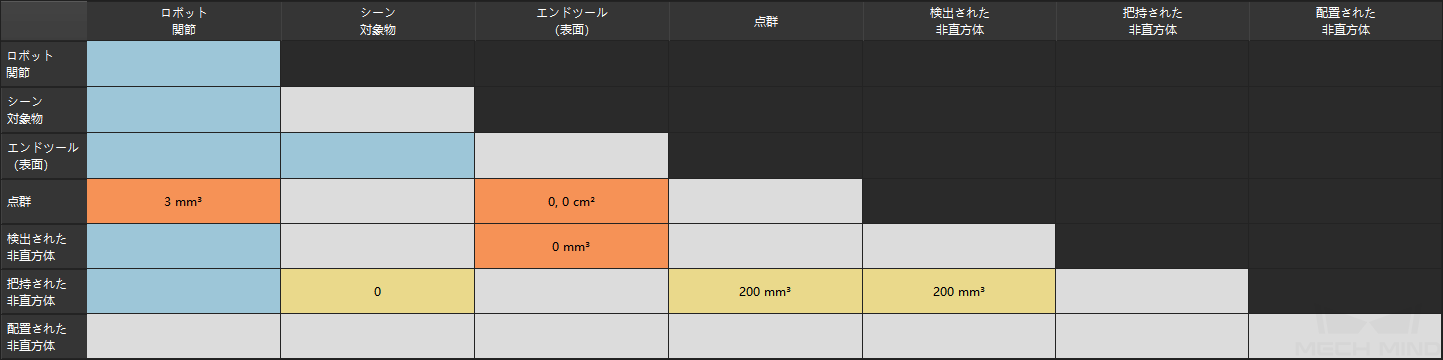
衝突ボリュームのしきい値:
衝突検出中に把持された直方体と他の部分間で許容される衝突ボリュームを指します。
下図に示すように、設定した後、把持された直方体との衝突検出シーンが得られます。
4.2. 非直方体¶
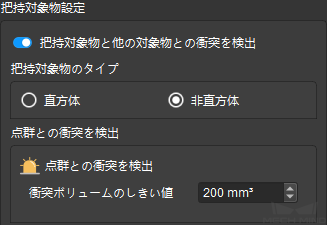
非直方体モデルの追加方法:
物体のSTLモデルとbinvoxモデルファイルをプロジェクトのcollision_modelsフォルダに移動します。次に、Mech-Visionでステップ 点群を外部サービスに送信 を使用して、ステップパラメータ 対象物情報を送信 を Ture に設定します。
衝突ボリュームのしきい値:
衝突検出中に把持された非直方体と他の部分間で許容される衝突ボリュームを指します。
下図に示すように、設定した後、把持された非直方体との衝突検出シーンが得られます。

注意
Mech-Viz1.6.0バージョンは非凸多面体OBJモデルの衝突検出に対応しません。