3. ロボット関節の設定¶
衝突検出には、ロボット関節の衝突検出がデフォルトでオンになっています。ロボット関節の設定は、主にロボット関節が点群との衝突を検出するための関連パラメータを設定することです。
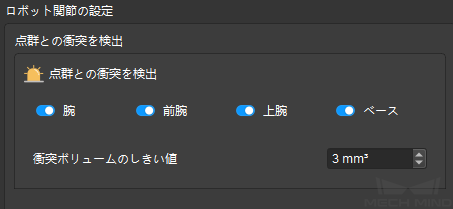
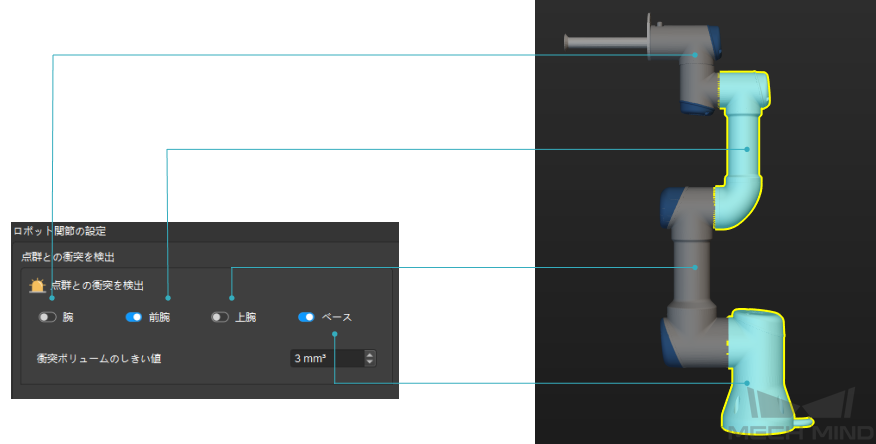
ロボットは、腕、上腕、前腕、ベースの4つの部分で構成されます。下図に示すように、衝突検出を行う部分を選択して、選択された部分がハイライト表示されます。
衝突ボリュームのしきい値
初期値:3調整説明:衝突ボリュームのしきい値とは、衝突検出中にロボットと点群の間で許容される衝突ボリュームを指します。ただし、ロボットはSTL形式のモデルであるため、表面と点群間の衝突のみを検出できます。したがって、ここでの衝突ボリュームは、 ロボットモデルの表面と衝突するボクセルの数 と ボクセルのボリューム の積を指します。