1. 点群設定¶
プロジェクトでは、点群を処理しなければなりません。点群の衝突検出を行う前に、Mech-Visionでステップ 点群を外部サービスに送信 を実行する必要があります。
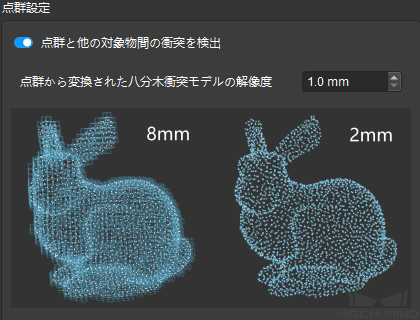
点群そのものを衝突検出に使用できません。まず、点群を八分木に変換する必要があります(八分木は点群を中心とした小さな立方体です)。これらの小さな立方体がロボットや治具と衝突したら、点群の衝突が発生したとみなされます。 点群から変換された八分木衝突モデルの解像度 を変更することで各小さな立方体の辺長を調整することができます。下図では、左側の解像度は10mmで、右側の解像度は2mmです。解像度を適切に調整することにより、点群をよりよく表現する立方体を作成し、より正確な点群衝突検出を実現できます。

同じ(ブロック)点群の場合:
解像度が低いほど、ボクセル立方体の数は多くなり、計算はより正確になり、所要時間も長くなります。
解像度が高いほど、ボクセル立方体の数が少なくなり、計算は粗くなりますが高速になります。
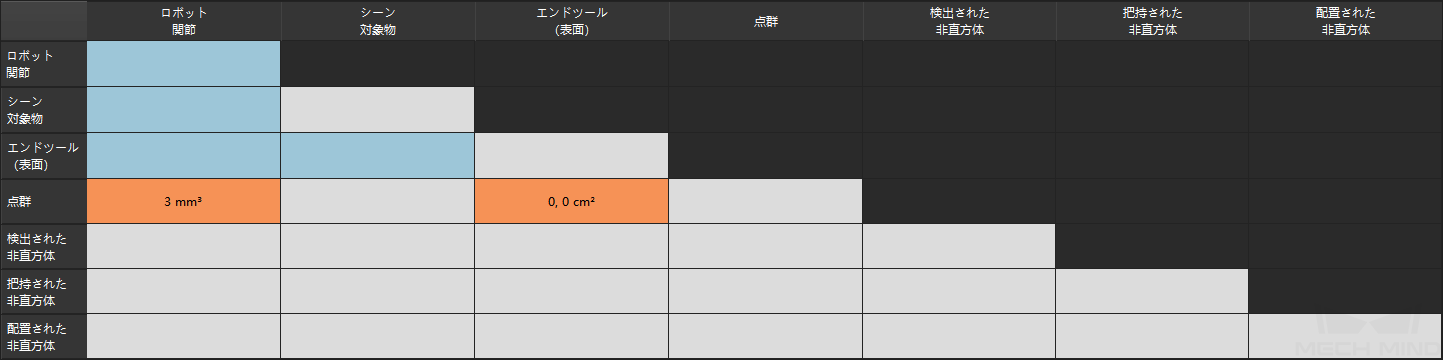
下図に示すように、設定が完了すると、点群を含む衝突検出シーンが得られます。デフォルトで検出された衝突に加えて、点群とロボット関節、点群とエンドツールも検出されます。