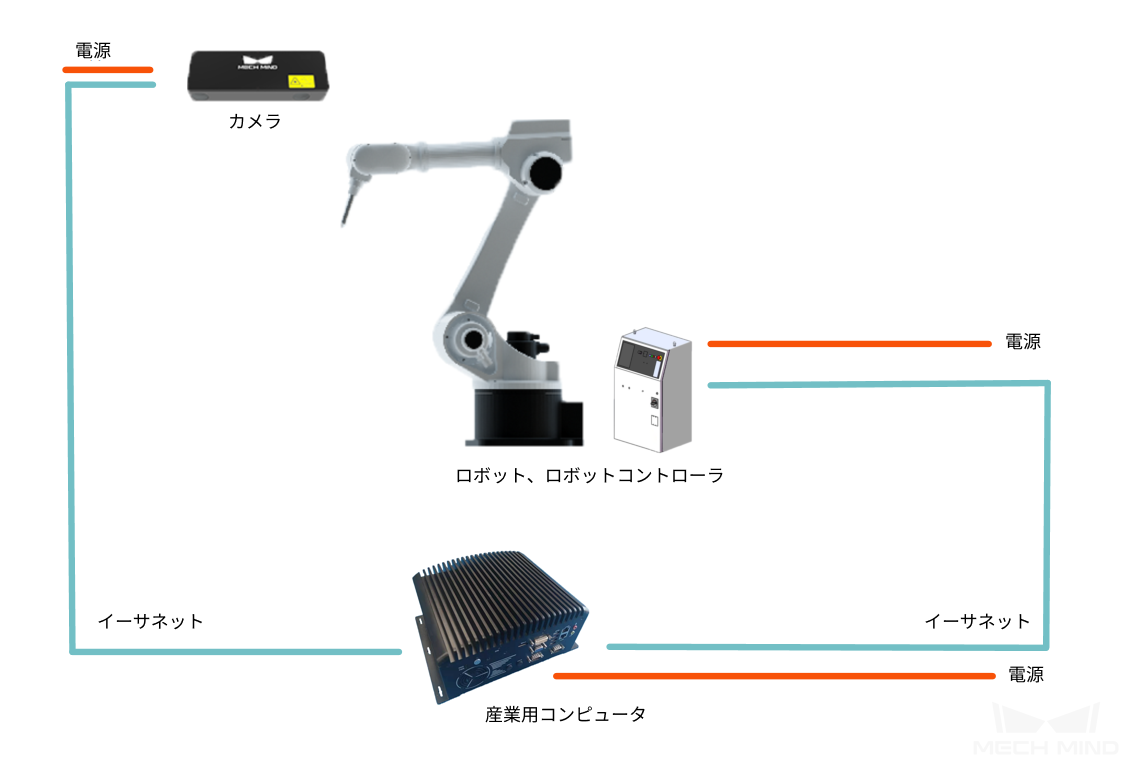
システム全体の接続¶
様々なハードウェアを互いに接続するには、カメラとロボットを取り付けた後、ケーブルを使用してそれらを産業用コンピュータに接続する必要があります。
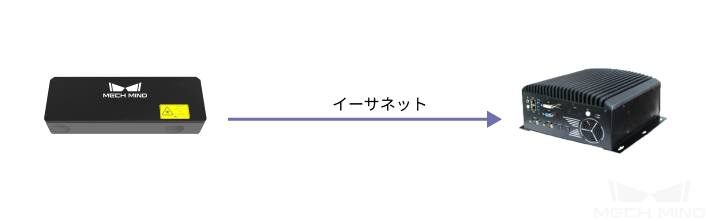
カメラを産業用コンピュータに接続¶
当社が提供するLANケーブルを使用して、 カメラ と 産業用コンピュータ を接続します。産業用コンピュータには複数のポートがあり、接続するポートはどれでも選択できます。その後、必要に応じて、対応するポートのネットワークセグメントを変更できます。
ロボットを産業用コンピュータに接続¶
LANケーブルを使用して コントローラー と 産業用コンピュータ を接続します。接続が完了したら、コントローラーの電源を入れ、ティーチペンダントを起動します。
注意
コントローラーのLANポートの選択に注意してください。詳しくは、 ロボット通信設定 をご参照ください。
ロボットと絡まりが発生しないようにケーブルを配置してください。
IP設定とロボット通信設定¶
産業用コンピュータの2つのネットワークポートはロボットとカメラをそれぞれ接続する必要があるため、2つのIPを設定する必要があります。ユーザーは、実際のニーズに応じて対応するポートとネットワークセグメントを設定し、 産業用コンピュータ と 接続デバイス が同じネットワークセグメントにあることを確認してください。
本例では、ロボットに接続されている産業用コンピュータのポートのIPが「192.168.100.1」に設定されています。
カメラに接続されている産業用コンピュータのポートのIPが「192.168.100.2」に設定されています。
ソフトウェアがロボット実機を制御できるために、 ロボット通信設定 を参照して対応するロボットの通信設定を完了してください。
以上でハードウェアシステム全体の接続は完了しました。最後に回路を確認して電源を入れてください。次の節を参照して産業用コンピュータのソフトウェアを設定してください。