概要¶
Mech-Vizは、Mech-Mind株式会社が独自開発した新世代の知能ロボットプログラミングソフトウェアです。可視化されたノーコードのプログラミングインターフェイスにより、ワンクリックでシミュレーションを実行できます。経路計画、衝突検出などの知能アルゴリズムが搭載され、世界の様々な主流メーカーのロボットに対応しています。Mech-Mindのほかのソフトウェアと併用してMech-Mindビジョンシステムを形成し、ビジョンに基づいた知能化生産を可能にします。
メインインターフェイス¶
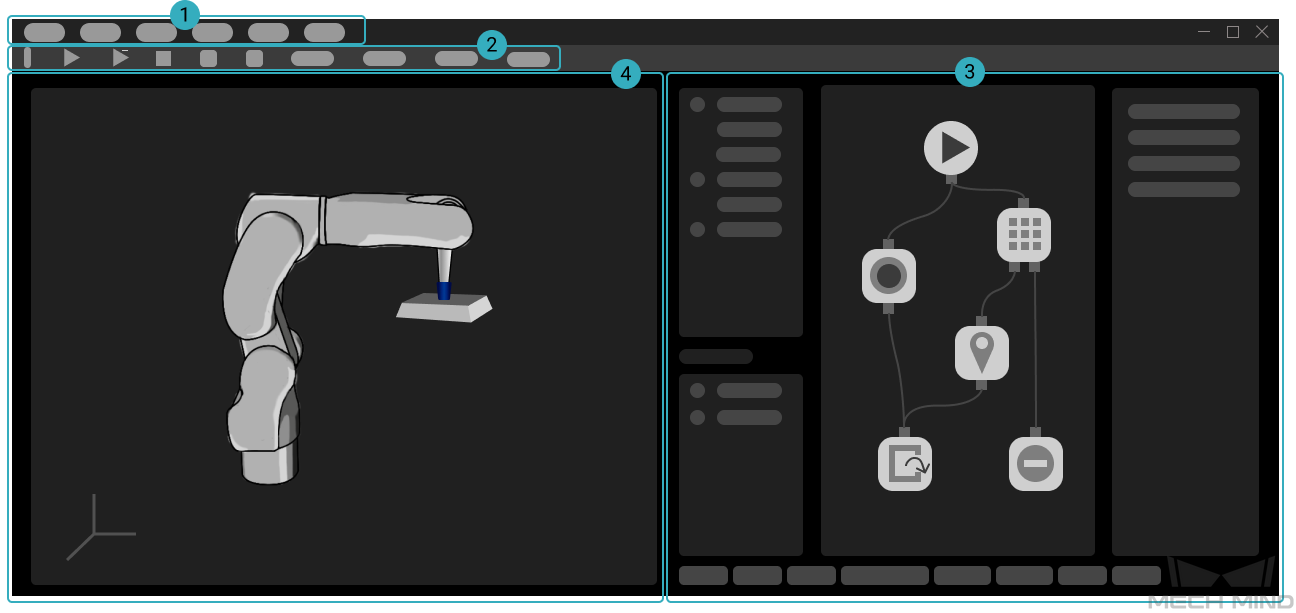
Mech-Vizのメインインターフェイスは、四つの部分から構成されます。
① メニューバー :プロジェクトの操作に関する基本的な機能とビュー、ディスプレイを含むツールです。
② ツールバー :プロジェクトのシミュレーションやロボット運動速度の調整などの制御を実現します。
③ 機能パネル:プロジェクトを設定します。下記の8つのパネルがあります。
④ 3Dシミュレーションエリア:プロジェクトを実行、またはシミュレートする際にロボットの運動経路、衝突検出の結果、視覚処理によって取得した位置姿勢と点群などを表示します。
3Dシミュレーションエリアの概要¶
3Dシミュレーションエリアは編集可能な可視化ウィンドウです。Mech-Vizの機能を把握するには、3Dシミュレーションエリアを理解することが必要です。
基本的な操作¶
視点を回転する |
マウスの左ボタンを押したままドラッグする |
|
視点を切り替える |
マウスの右ボタンをクリックしてショートカットメニューで選択する |
|
視点を並進する |
マウスのホイールを押したままドラッグする |
|
拡大・縮小 |
ホイールを回す |
|
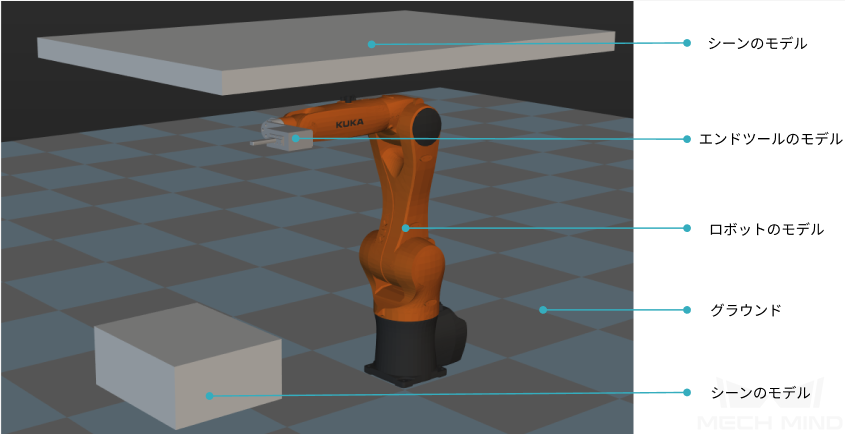
シーンの物体の表示¶
プロジェクトを構築する際に、3Dシミュレーションエリアは下図のようになります。デフォルトでは、構築を開始する前にグラウンドとロボットモデルだけが表示されます。
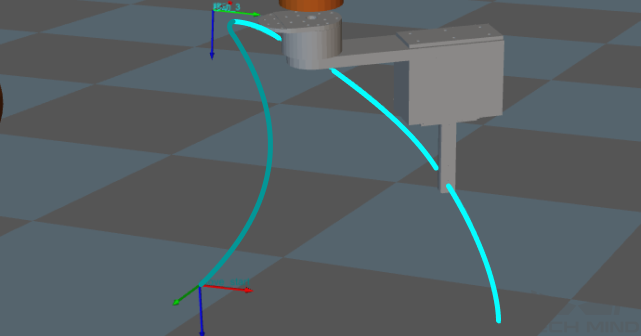
運動経路の表示¶
ロボット実機を制御する時も、仮想ロボットの運動経路をシミュレートする時も、これからロボットが実行する経路が3Dシミュレーションエリアに表示されます。経路をシミュレートすることでより合理的な動作経路を計画することができます。
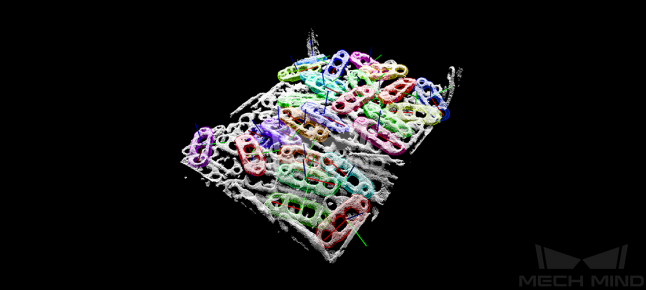
点群と把持点の表示¶
ビジョンサービスによって取得した結果が3Dシミュレーションエリアに表示されます。普通、完全な視覚結果には、カメラでキャプチャしたワークとシーンの点群、ワークの位置姿勢、ワークの番号、ワークの特徴を表示するラベルが含まれます。
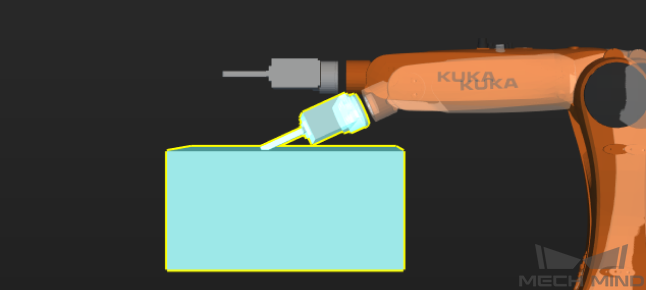
衝突判断の表示¶
プロジェクト実行中、Mech-Vizではロボット運動経路にロボット実機とエンドツールがシーンの物体、ワーク、箱と衝突するかを検出します。下図に示すように、衝突を検出したら、3Dシミュレーションエリアでは衝突が発生するものがハイライト表示されます。