Mech-Vizを使ってみる¶
実際の応用では、Mech-Vizによるプロジェクトデバッグの手順は下記の通りです。
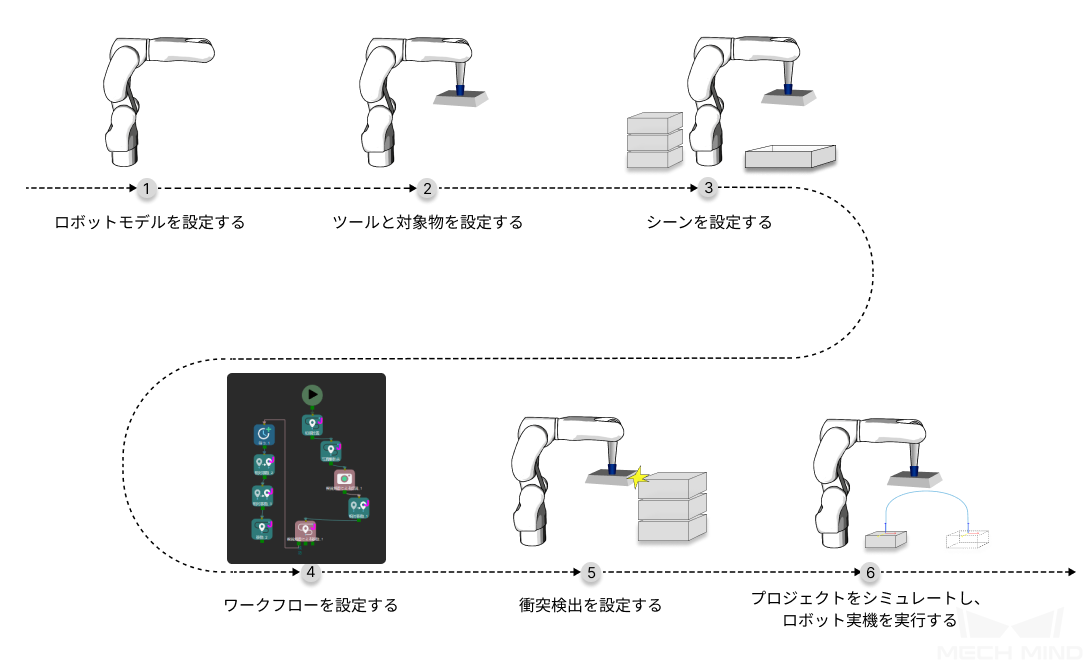
本節では、段ボール箱の把持を例として、最初のMech-Vizプロジェクトを始めましょう。
最初のプロジェクトを構築する¶
プロジェクトの構築を成功させるために、下記の手順に従ってお読みください。
注釈
Mech-Vizサンプルプロジェクト 、 Mech-Visionサンプルプロジェクト を例として、上記の手順の設定を紹介していきます。
実際の応用では、Mech-Vizによるプロジェクトデバッグの手順は下記の通りです。
本節では、段ボール箱の把持を例として、最初のMech-Vizプロジェクトを始めましょう。
プロジェクトの構築を成功させるために、下記の手順に従ってお読みください。
注釈
Mech-Vizサンプルプロジェクト 、 Mech-Visionサンプルプロジェクト を例として、上記の手順の設定を紹介していきます。