1. ロボットモデルを設定して実機に接続する¶
プロジェクトを作成して保存し、ロボット実機に接続することはプロジェクト構築の第一歩です。
注意
V1.6.0バージョンのMech-Vizは主要メーカーのロボットインストールパッケージのみを統合します。他のロボットは、 オンラインロボットライブラリ からダウンロードしてインポートします。
本例で使用されたUR_3ロボットはソフトウェアに含まれていません。下図に示すように、最初に対応するロボットファイルをダウンロードしてソフトウェアにインポートして、ロボットライブラリでそれを選択する必要があります。
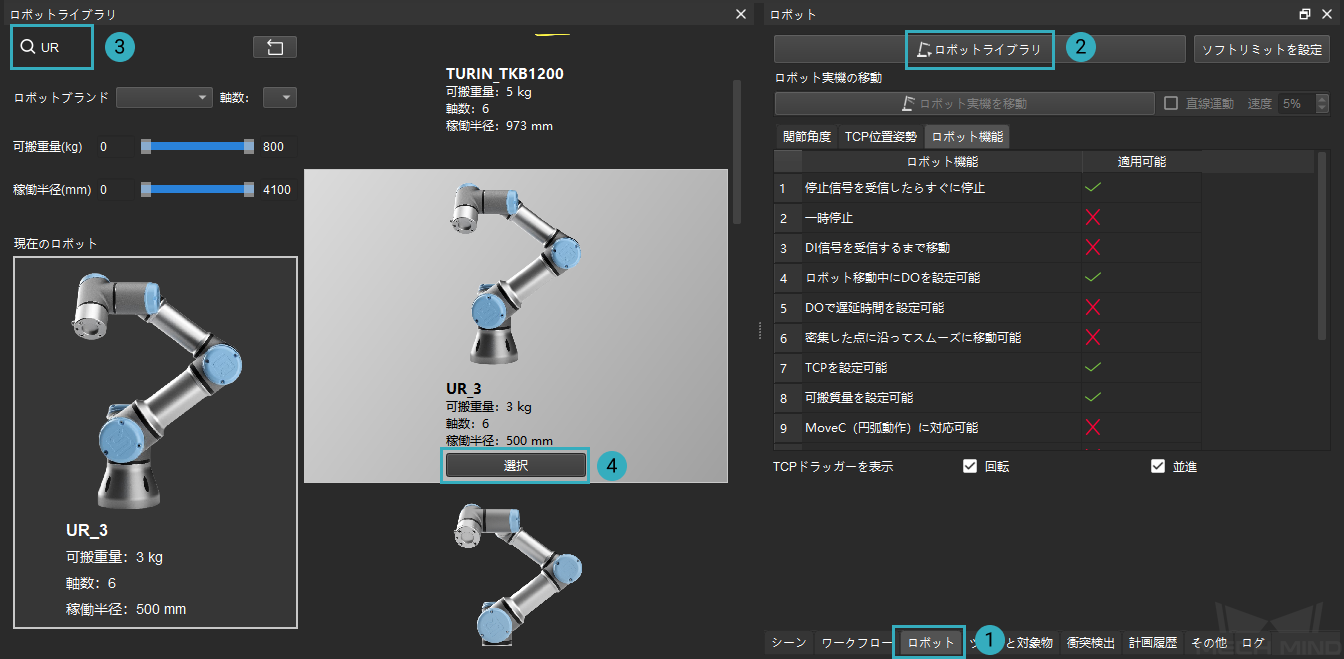 ① 「ロボット」パネルに切り替えます。② ロボットライブラリ をクリックします。③ ロボット型番を検索します。④ ロボットを選択します。
① 「ロボット」パネルに切り替えます。② ロボットライブラリ をクリックします。③ ロボット型番を検索します。④ ロボットを選択します。をクリックして、プロジェクトをローカルに保存します。
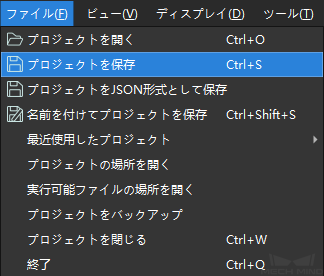
ツールバーの
 にチェックを入れます。
にチェックを入れます。Mech-Centerのインターフェイスで
 をクリックします。
をクリックします。Mech-Centerのログに ロボットが接続されました のメッセージが表示され、サービスステータスバーに
 が表示された場合、ロボット実機が正常に接続されました。
が表示された場合、ロボット実機が正常に接続されました。
注意
データの損失を防ぐために、プロジェクトを保存することにご注意ください。