計画履歴¶
計画履歴パネルでは、Mech-Vizプロジェクト実行中の計画情報とエラーの説明を表示できます。これは、プロジェクトのデバッグに役立ちます。本節では、主に下記の内容を含め、計画履歴パネルに関連する内容について紹介します。
概要¶
機能の紹介¶
実行中に衝突アラーム、到達不能な場所などの問題が発生した場合は、 計画履歴 から原因を確認できます。
計画履歴の結果の構造はツリー構造であり、Mech-Vizが計画したプロセス全体がより詳細かつ完全に記録されます。ログと比較して、計画履歴では、計画の各ノード(特に失敗したノード)を詳細に表示できます。
一部のエラーはシリアルエラーです。1つの子ノードが計画に失敗した場合、全体的な計画は失敗します。例えば、ある関節角度が正しく設定されていない場合、ロボットは計画された位置に到達できません。
一部のエラーは並列エラーです。1つの子ノードのみが正常に計画されている場合、全体的な計画は成功します。例えば、Mech-Visionによって計算された把持位置姿勢では、ノードのいずれかが正常に実行された場合、それは、把持位置姿勢で対象物を把持できることを意味します。
ヒント
プロジェクトを実行する過程で、失敗したノードに特に注意を払う必要があります。
パネルの紹介¶
計画履歴 パネルはMech-Vizの機能パネルにあります。

機能パネルに 計画履歴 が表示されない場合は、メニューバーの ビュー をクリックし、 計画履歴 にチェックを入れる必要があります。
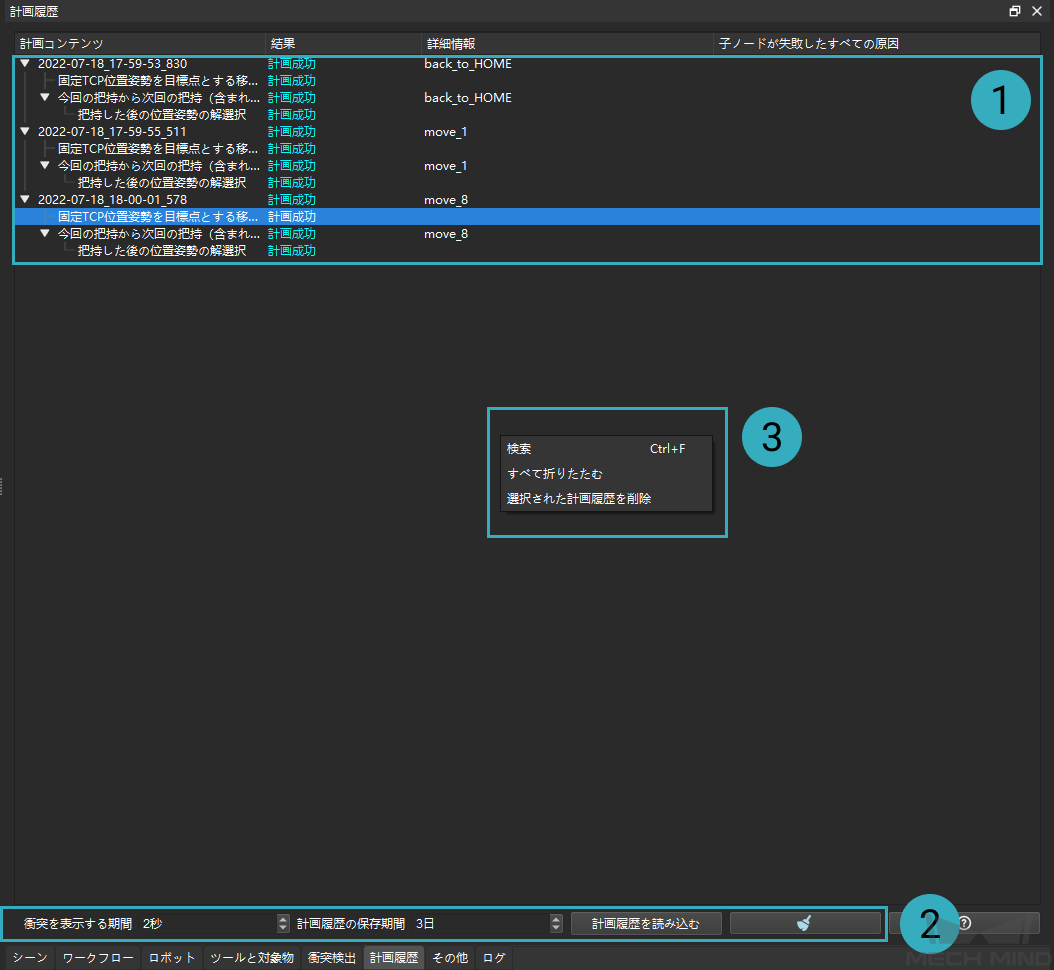
計画履歴パネルには、①「計画コンテンツ」、「結果(成功と失敗)」、「詳細情報」、「子ノードが失敗したすべての原因」、②「衝突を表示する期間」、「計画履歴の保存期間」、「計画履歴を読み込む」、「クリア」、「ヘルプ」のボタンまたはオプションが含まれています。また、③を右クリックして、「検索」、「すべて折りたたむ」、「選択された計画履歴を削除」のオプションが表示されます。
各オプションおよび各ボタンの機能は以下のどおりです。
上部にあるオプション:

計画コンテンツ: 名前によって特定日時の計画履歴を表示できます。展開すると、各レベルの計画コンテンツが表示されます。
結果: 今回の計画が成功したかどうかを表示します。失敗したら赤で表示されます。失敗した項目をクリックして詳細情報を確認できます。
詳細情報: 計画されたある経路の移動タスク、およびこの計画のタスクの詳しい情報が表示されます。
子ノードが失敗したすべての原因: 計画に失敗した場合、ここでは具体的な原因が表示されます。
下部にあるボタンまたはオプション:

衝突を表示する期間: 計画履歴から衝突を表示するための期間です。この期間を超えると、計画に失敗した時のロボット位置姿勢が表示されません。
計画履歴の保存期間: 計画履歴を保存するための期間です。この期間を超えると、現在の計画履歴が以前の計画履歴を上書きします。
計画履歴を読み込む: 以前保存した計画履歴を読み込みます。
クリア: クリックすると現在の計画履歴がクリアされます。
ヘルプ: クリックすると計画履歴の説明が表示されます。
右クリックして表示されるオプション:
検索: 表示されたオプションから 検索 をクリックすると、関連する検索機能が計画履歴パネルの下部に表示されます。計画履歴の結果のタイプで計画履歴のコンテンツを検索できます。

すべて折りたたむ: 子ノードをすべて折りたたみ、親ノードのみを表示します。
選択された計画履歴を削除: 選択された項目を削除します。
衝突結果の可視化¶
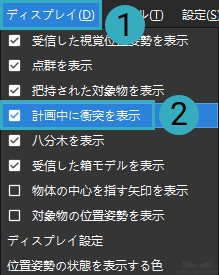
計画中に衝突を表示¶
計画履歴に衝突結果のグラフィカルなプロンプトを表示するには、メニューバーの ディスプレイ をクリックして、 計画中に衝突を表示 にチェックを入れます。
シーンとの衝突
衝突が発生したタスクの名前をクリックして、衝突したすべての対象物がハイライト表示されます。
衝突した対象物をクリックして、それがハイライト表示されます。
点群との衝突
衝突が発生したタスクの名前をクリックして、衝突したすべての対象物がハイライト表示されます。
衝突ボリューム をクリックして、衝突した点群がハイライト表示されます。
点群と衝突したときに、 衝突接触を記録 しないと、別の衝突する対象物のみがハイライト表示されます。
把持対象物との衝突
把持対象物と衝突が発生した場合、それがハイライト表示されます。
詳しい説明¶
ロボット自己衝突¶
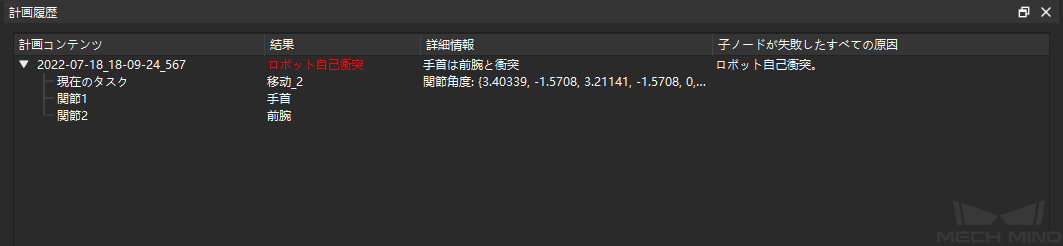
原因: 計画履歴の結果には ロボット自己衝突 が表示されます。子ノードからタスク 移動_2 でロボットの手首と腕の衝突を確認できます。
対策: ロボットの関節角度、TCP位置姿勢を調整して、自己衝突を回避します。
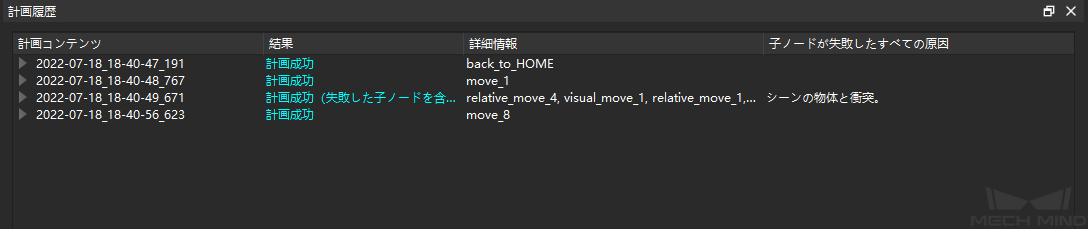
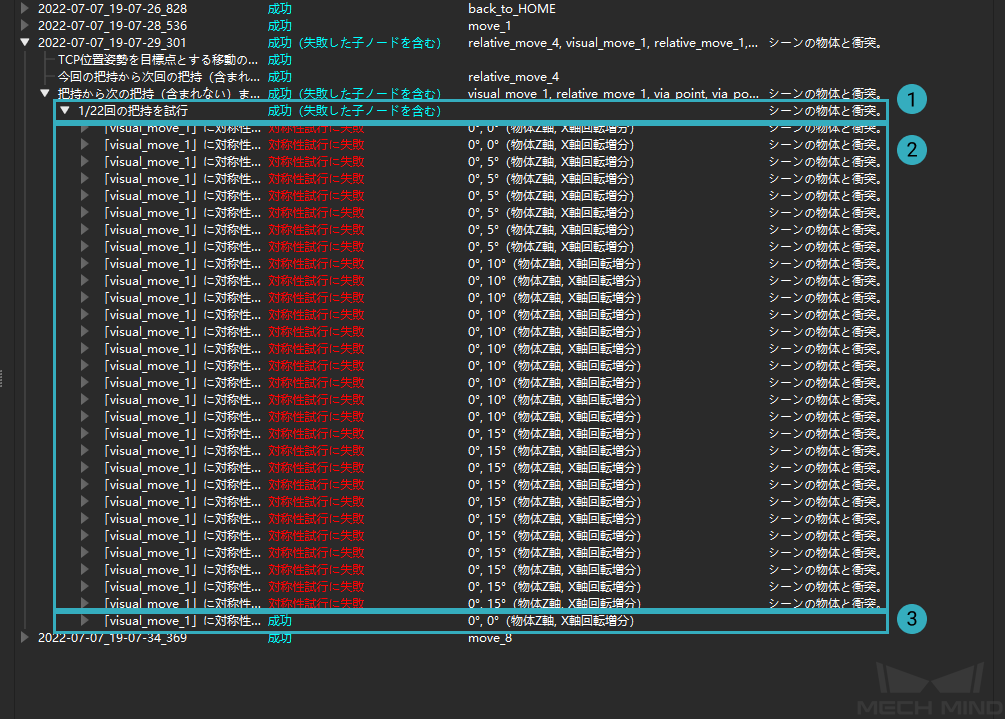
シーンの物体との衝突¶
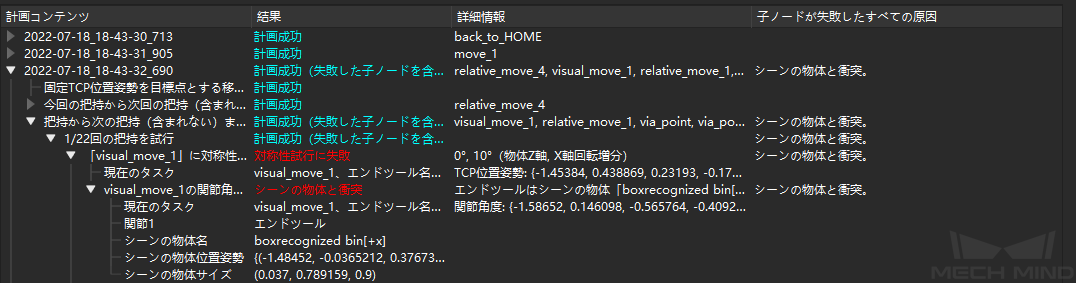
原因: 計画履歴の「子ノードが失敗したすべての原因」には シーンの物体との衝突 が表示されます。計画コンテンツで子ノードを展開すると、タスク 移動_1 から タスク 移動_2 まで実行する過程にエンドエフェクタとシーンのモデルが衝突したことを表示できます。
対策: シーンのモデルとの衝突を避けるために、ロボットの位置姿勢またはTCP位置姿勢を調整します。または、衝突モデルの位置を調整します。

点群との衝突点の数が制限を超える¶

原因: 下図の把持位置姿勢に従って把持すると、衝突点の数が84で、設定されたしきい値(設定されたしきい値は36)を超え、衝突が検出されます。
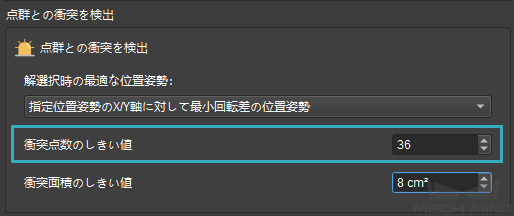
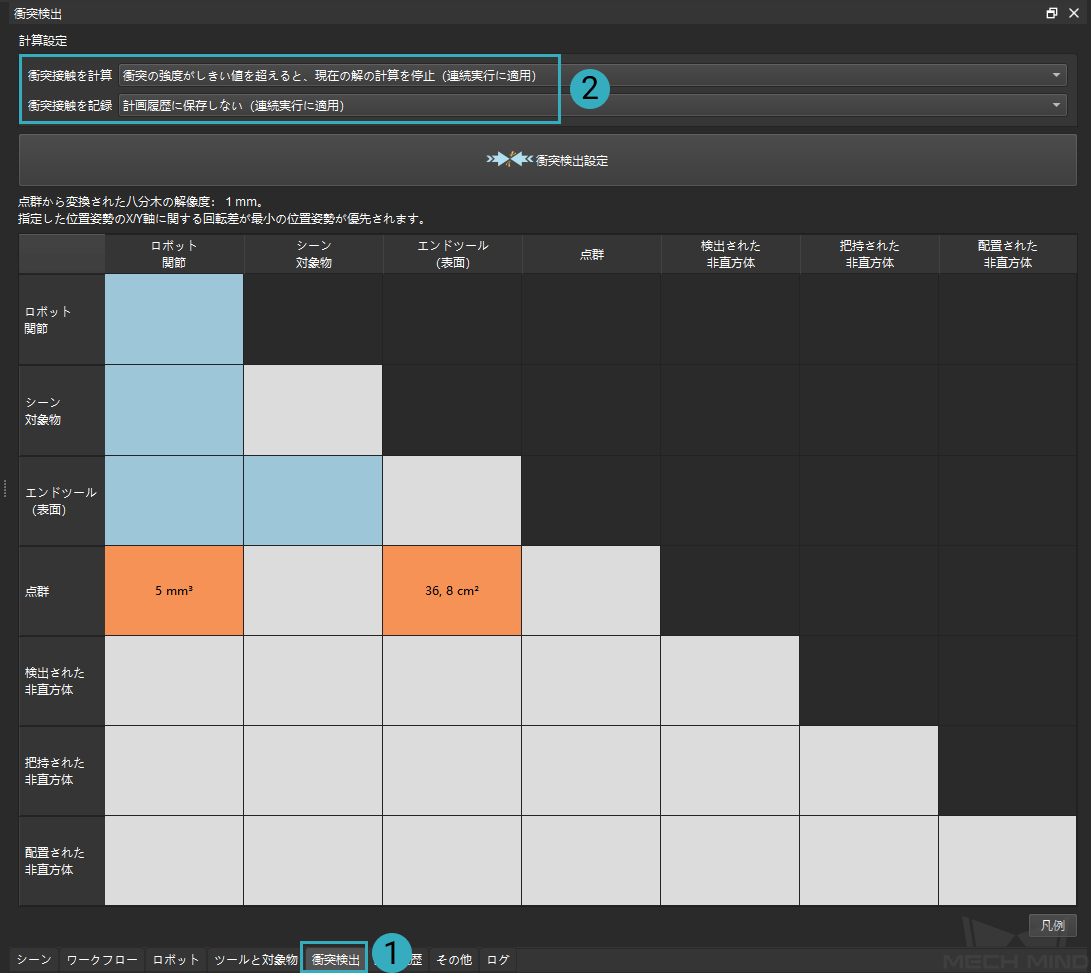
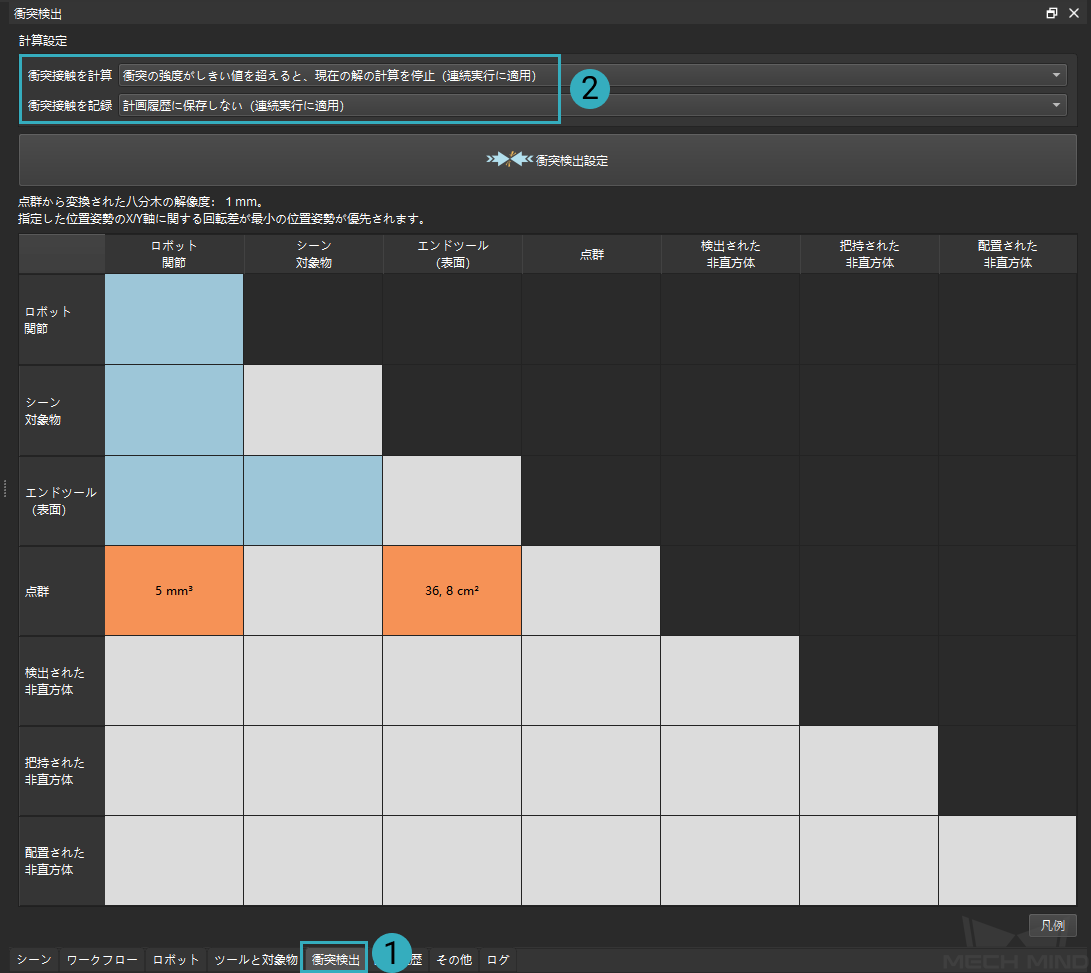
対策: ロボット実機の動作中に実際の衝突があるかどうかを確認し、衝突検出パネルで 衝突接触を計算 を 各解に対応する完全な衝突接触を計算 に設定し、 衝突接触を記録 を 計画履歴に保存 に設定してから、計画履歴パネルで具体的な原因を確認できます。また、衝突点の数のしきい値、把持位置姿勢、TCP、治具モデルなども調整することができます。
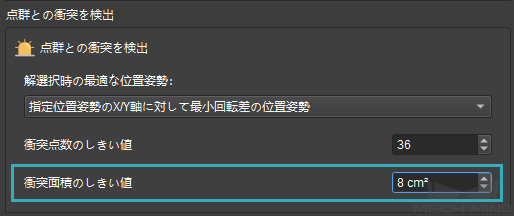
点群との衝突面積が制限を超える¶
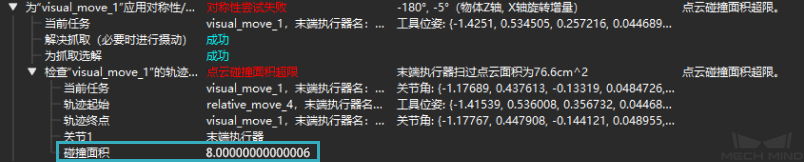
原因: 下図の把持位置姿勢に従って把持すると、衝突面積が8.00000000000006で、設定されたしきい値(設定されたしきい値は8)を超え、衝突が検出されます。
対策: ロボット実機の動作中に実際の衝突があるかどうかを確認し、衝突検出パネルで 衝突接触を計算 を 各解に対応する完全な衝突接触を計算 に設定し、 衝突接触を記録 を 計画履歴に保存 に設定してから、計画履歴パネルで具体的な原因を確認できます。また、衝突点の数のしきい値、把持位置姿勢、TCP、治具モデルなども調整することができます。