その他¶
Mech-Vizでロボットの移動経路を計画する際に、ロボットに対して実行またはタスク収集の設定を行う必要があります。本節では、下記の内容について紹介していきます。
下図に示すように、メインインターフェイスの右下隅にある① その他 をクリックして、「その他」パネルに入ります。
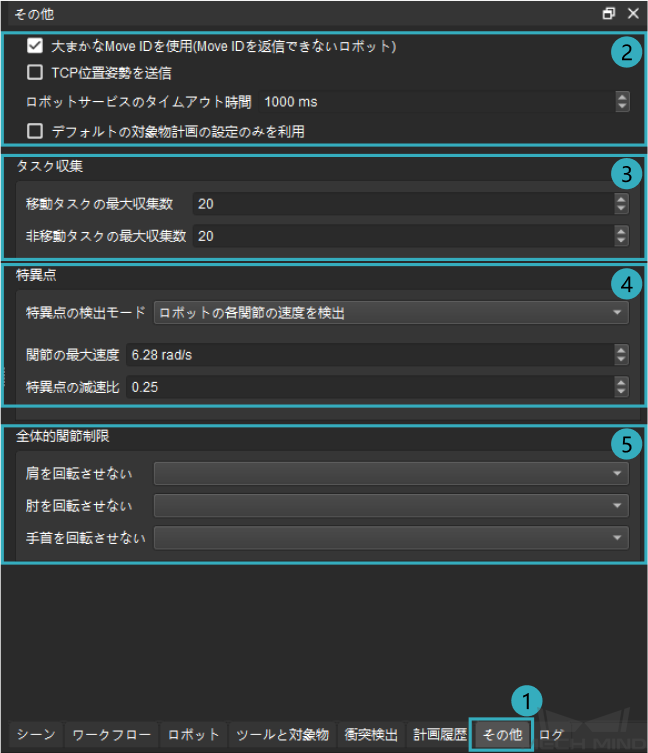
上図では、②③④⑤はそれぞれ、 実行設定 、 タスク収集 、 特異点 、 全体的関節制限 の設定です。
実行設定¶
大まかなMove IDを使用(Move IDを返信できないロボット) :Mech-Vizの計算によって得られた大まかなMoveIDを使用するとき、必要に応じて非移動タスク(「視覚処理による認識」や「DOを設定」など)は移動タスクの送信を中止することなく、ロボットがスムーズに動作することが可能です。
TCP位置姿勢を送信:デフォルトでは、Mech-Vizから 関節角度 が送信されます。チェックを入れたら TCP位置姿勢 が送信されます。
ロボットサービスのタイムアウト時間 :移動タスク以外のタスク(「DOを設定」や「DIをチェック」など)とロボットとの通信のタイムアウト時間を指します。デフォルトでは1000msとなっています。
デフォルトの対象物計画の設定のみを利用:チェックを入れれば、複数の対象物ラベルがある場合でも、デフォルトの対象物の対称性を使用します。
タスク収集¶
移動タスクの最大収集数 : 計画に使用される移動タスクの最大数を指します。プロジェクトでは、設定された値を超えた移動タスクを使用すれば計画を中断することになります。
非移動タスクの最大収集数 : 計画に使用される非移動タスクの最大数を指します。プロジェクトでは、設定された値を超えた非移動タスクを使用すれば計画を中断することになります。
特異点¶
ロボットが特異点付近に到達したら、直線運動を実行できなくなる可能性があります。ソフトウェアから送信された運動コマンドに起因する特異点エラーを防止するために、経路計画に特異点を回避するようにします。
特異点の検出モード に次のオプションがあります。
ロボットの各関節の速度を検出
関節の最大速度と減速比を設定することで特異点を引き起こす可能性のある計画を回避します。
関節の最大速度 :関節の運動速度がこの値を超えたときに、その点が特異点と判断される可能性があります。
特異点の減速比 :減速比がこの値を超えたときに、その点が特異点と判断される可能性があります。減速比=減速後の速度(または加速度)/設定された元の速度(または加速度)。
ロボット関節角度を検出
関節と角度の範囲を設定することでロボット特異点を引き起こす可能性のある計画を回避します。 直線運動だけを検出します 。
関節を選択 :ロボットの関節を選択します。
角度の下限 :関節角度がこの値よりも小さいときに、その点が特異点と判断される可能性があります。
角度の上限 :関節角度がこの値よりも大きいときに、その点が特異点と判断される可能性があります。
全体的関節制限¶
肩を回転させない/肘を回転させない/手首を回転させない : 対象物を把持している時に または 全実行過程に が選択可能で、ロボットの余計な回転を減らすことができます。
肩/肘/手首を全部「回転させない」に設定するのは、必ずしも最適解とは限りません。
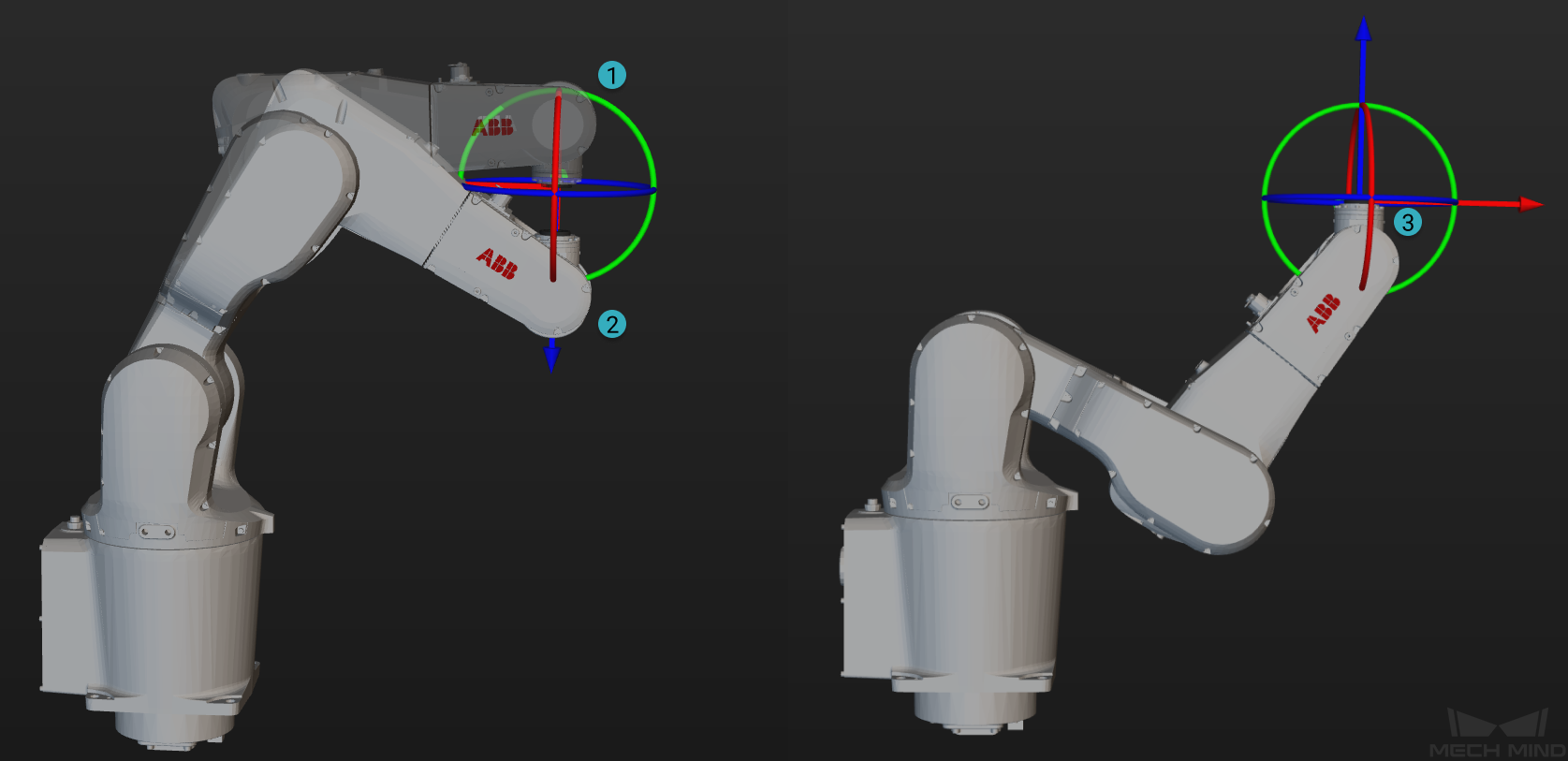
例えば、ロボットが①から②に移動する場合、「手首を回転させない」に設定したらロボットがさらに激しく回転し、最終的に③の姿勢になるかもしれません。この場合、「肩を回転させない」と「肘を回転させない」に設定してください。
注釈
移動タスクの 解の集り の優先度は、ここでの全体的設定よりも高くなります。移動タスクに設定されていない場合、全体的関節制限が有効になります。