解の集り¶
Mech-Vizでロボットの特定のTCP位置姿勢を求めるプロセスでは、関節角度からTCP位置姿勢を求める解が唯一であり、これは正解です。関節角度がTCP位置姿勢から逆に求めると、関節角度は最大8つの結果を求める可能性があり、これは逆解です。
順運動学と逆運動学に基づいて、TCP位置姿勢が既定である場合、ロボットの逆運動学は最大8セットの関節角度を計算できます。8セットの関節角度は、3つの変数でロボットが特異点に対する姿勢を表示できます。下のリストに示すように、これは解の集りです。
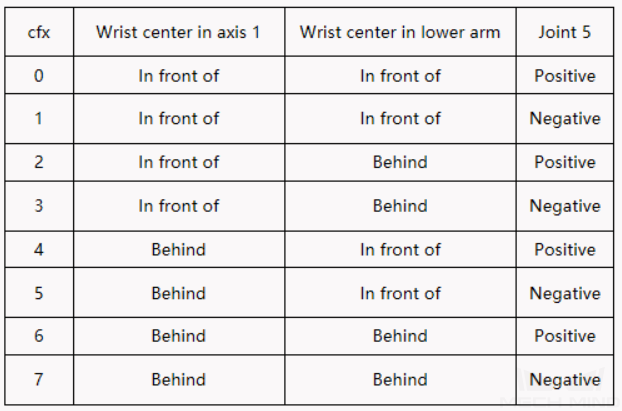
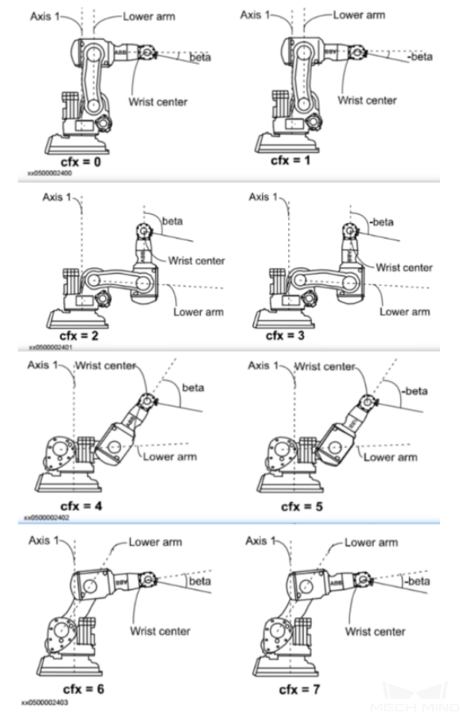
ロボットの移動中の肩、肘、手首の回転状態は相対的であり、ロボットの現在または前の位置姿勢と比較して分析する必要があります。たとえば、cfx=0からcfx=1までのロボットの姿勢では、ロボットの5軸の角度のみが正から負に変化します。これは、手首を回転させることを意味します。図の肩と肘の回転はすべて、cfx=0の画像のロボットの姿勢を基準にしています。8つの解の集りに対応するロボットの姿勢は下図に示します。
解の集まりが指定されていない場合、ロボットは解の集りを超えて解を選択し、肩/手首/肘を回転させてロボットの移動を非常に危険にし、または移動経路が不合理に見えます。さらに、解の集りの以外の解で動作するとロボットの特異点を通過するため、ロボットの移動が失敗する可能性があります。3つの変数すべてが指定されている場合、ロボットには最大で1つの実行可能な解があります。