衝突検出の設定¶
以下の4つの設定があります。
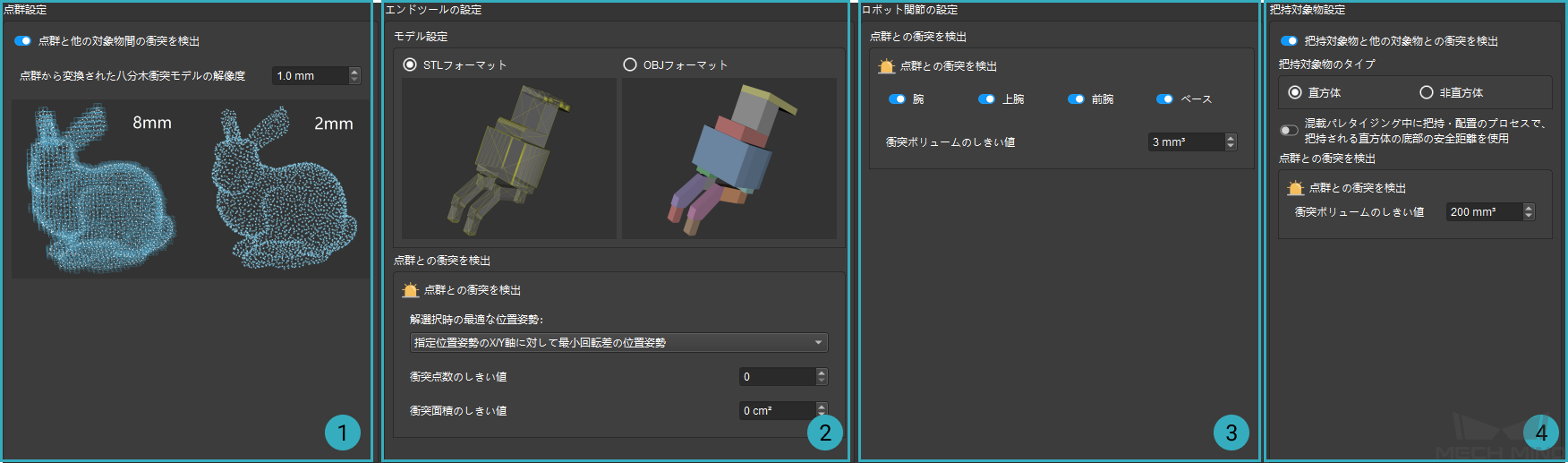
上記4つの設定に加えて、デフォルトではロボット関節同士の衝突、ロボット関節とシーンの物体の衝突、ロボット関節とエンドツール(表面)の衝突、シーンの物体とエンドツール(表面)の衝突を検出します。上記の4つの設定をよく理解してから、実際のニーズに応じて衝突検出を設定することができます。
以下の4つの設定があります。
上記4つの設定に加えて、デフォルトではロボット関節同士の衝突、ロボット関節とシーンの物体の衝突、ロボット関節とエンドツール(表面)の衝突、シーンの物体とエンドツール(表面)の衝突を検出します。上記の4つの設定をよく理解してから、実際のニーズに応じて衝突検出を設定することができます。