2. エンドツール設定¶
エンドツールモデルの追加方法については、 モデルの追加 をご参照ください。
衝突検出には、エンドツールの衝突検出はデフォルトでオンになっています。エンドツールの設定は、主にSTLとOBJの2つの異なる形式のモデルを選択し、対応するパラメータを設定することです。
STLとOBJ形式のモデルについては、 STLとOBJモデルについて をご参照ください。プロジェクトを実行する時、ツール内部の点群の衝突を検出する必要があるかどうかによって選択します。
STL
OBJ
モデル種類
メッシュ(Mesh、三角形)
凸多面体の組合せ(ソリッド)
製造業上の製図
幅広く使用される
ほとんど使われない
衝突検出の合理性
三角形表面情報のみが検出できる
精密で効率的
パラメータ調整の柔軟性
より複雑なシーンではパラメータを調整するのが難しい
パラメータの調整が簡単で、柔軟性が高い
2.1. STLフォーマット¶
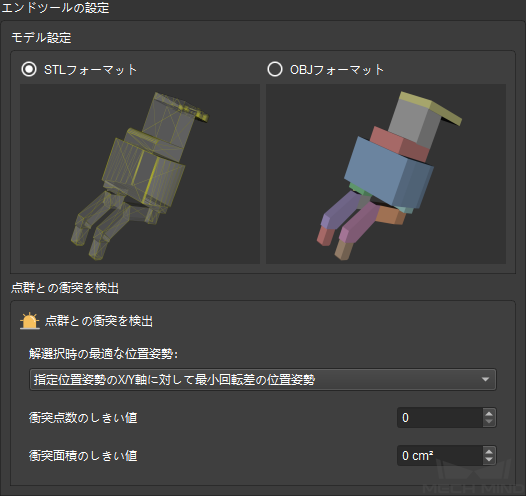
パラメータ設定:
衝突点数のしきい値:
初期値:0調整説明:把持するときにモデルの表面と衝突した点群の数の許容値を指します。衝突面積のしきい値:
初期値:0調整説明:点群が経路上でモデルの表面全体と接触する面積の許容値を指します。解選択時の最適な位置姿勢:
指定位置姿勢のX/Y軸を中心に最小回転差の位置姿勢:視覚処理による移動からのソートされた位置姿勢を指定位置姿勢とし、X/Y軸を中心に最小回転差の位置姿勢を確認することを意味します。X/Y軸を中心に回転する範囲で衝突が最小の位置姿勢:X/Y軸に関して対称性があるすべての点群衝突を計算し、衝突を最小から最大にソートすることを意味します。
2.2. OBJフォーマット¶
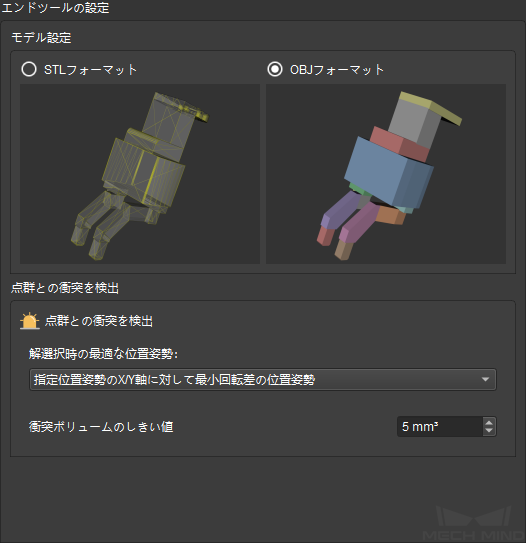
パラメータ設定:
衝突ボリュームのしきい値:
初期値:5調整説明:衝突検出の時にエンドツールが点群と衝突したボリュームの許容値を指します。解選択時の最適な位置姿勢:
指定位置姿勢のX/Y軸を中心に最小回転差の位置姿勢:視覚処理による移動からのソートされた位置姿勢を指定位置姿勢とし、X/Y軸を中心に最小回転差の位置姿勢を確認することを意味します。X/Y軸を中心に回転する範囲で衝突が最小の位置姿勢:X/Y軸に関して対称性があるすべての点群衝突を計算し、衝突を最小から最大にソートすることを意味します。
2.3. デバッグについて¶
衝突検出の設計時(特にバラ積みピッキングの場合)、対象物が把持されている間に、エンドツールが他の対象物に触れたり、動かしたりしても良いかを検討することが重要です。
例えば、箸でM&M'Sを挟むとき、箸が他の粒に触れても何の影響もありません。 この場合、衝突検出の閾値しきい値を高く設定し、ある程度の衝突を許容すれば、挟む成功率が高くなります。 また、箸が他の粒に触れると、対象物が移動することを理解すべきです。クランクシャフトのような鋼体を把持する場合、衝突は許されないので、衝突を避けるために衝突検出のしきい値を小さくする必要があります。
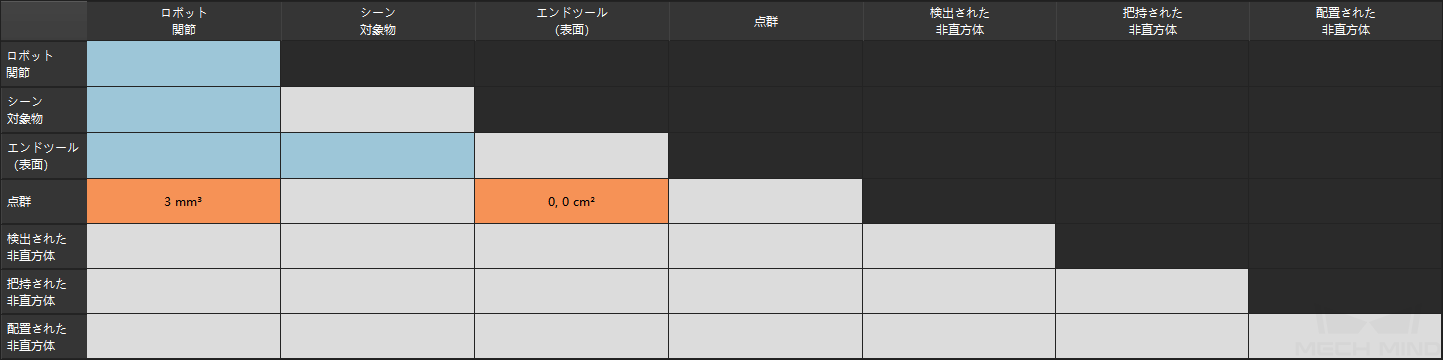
下図に示すように、設定した後、エンドツールを含む衝突検出シーンが得られます。