長方形の寸法と位置姿勢を計算¶
機能のディスクリプション
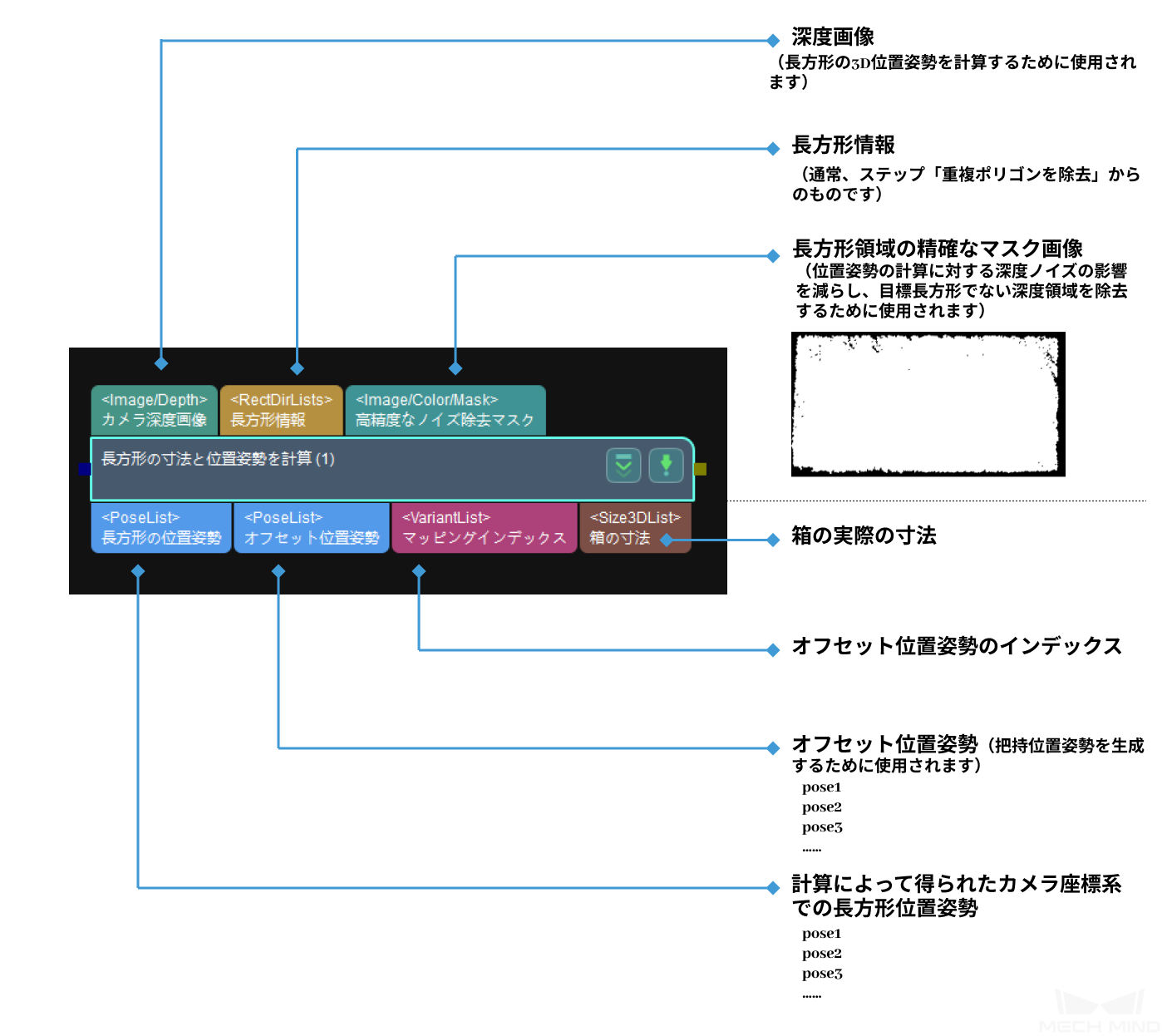
深度画像と長方形情報で、3D空間における長方形の対応する位置姿勢を計算します。
使用シーン
ステップ 重複ポリゴンを除去 と併用することになっています。 2D マッチング によって得られたカメラ座標系における長方形の物体の位置姿勢を計算することができます。
入力と出力
パラメータの説明
入力タイプ
調整説明:このパラメータは、入力タイプを選択するために使用されます。初期値:Depth推奨値:実際のニーズに応じて設定してください。オプション:Depth、 VertexAndSizeInputDepth
検索半径
調整説明:このパラメータは、画像内の指定位置の深度の検索半径を調整するために使用されます。単位はピクセルです。「入力タイプ」が「Depth」の場合にのみ有効です。初期値:20推奨値:20有効範囲:[0,+∞)吸盤のX方向のサイズ
調整説明:このパラメータは、吸盤被覆領域のX方向のサイズを調整するために使用されます。単位はmで、吸盤が対象箱よりも大きい場合は、近傍位置の箱を吸着しないように小さく調整されます。初期値:0推奨値:吸盤が対象箱よりも小さい場合は0に設定することをお勧めします。吸盤が対象箱よりも大きい場合は、実際の吸盤のサイズに合わせて設定してください。有効範囲:[0,+∞)吸盤のY方向のサイズ
調整説明:このパラメータは、吸盤被覆領域のY方向のサイズを調整するために使用されます。単位はmで、吸盤が対象箱よりも大きい場合は、近傍位置の箱を吸着しないように小さく調整されます。初期値:0推奨値:吸盤が対象箱よりも小さい場合は0に設定することをお勧めします。吸盤が対象箱よりも大きい場合は、実際の吸盤のサイズに合わせて設定してください。有効範囲:[0,+∞)吸盤が他の箱との重複比のしきい値
調整説明:作業中に吸盤が近傍位置の箱やボックスを吸着するのを防ぐために、このパラメータは現在の吸着が実行されているかどうかを判断するための基準として使用されます。非対象箱との重複比がこの値よりも小さい場合は吸着を行い、この値よりも大きい場合は吸着を行いません。初期値:0.3推奨値:実際のニーズに応じて設定してください。出力戦略
位置姿勢の数
調整説明:このパラメータは、1つの箱に対して位置姿勢の出力数を決定します。初期値:One推奨値:Oneオプション:One、Multiple