Accurately Calculate Pick Points According to Poses¶
Take the point clouds with normal vector and the plane pose list as input to calculate the 3D pick points. The procedure is shown in Figure 1.
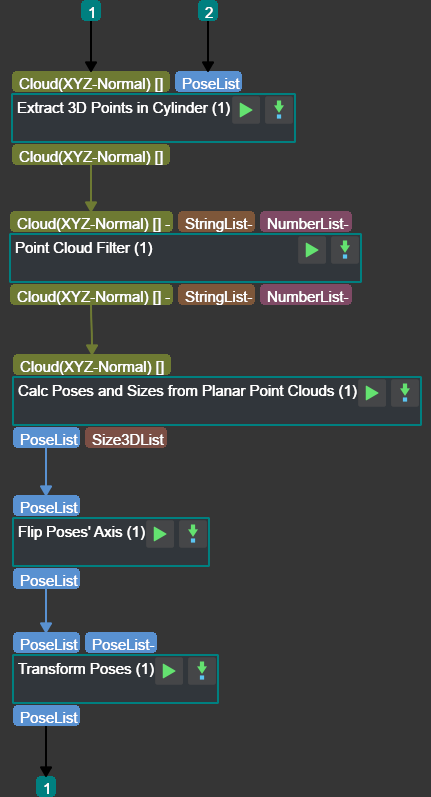
Figure 1 Procedure of calculating fine pick points according to coarse ones¶
The role of each step is as follows:
Extract 3D Points in Cylinder Take the point clouds with normal vector and the plane pick point list as input to extract the point cloud in the set cylinder.
Point Cloud Filter Take the point clouds which extracted in the previous step as input to remove the useless points according to the set parameters, and output the filtered point cloud.
Calc Poses and Dimensions from Planar Point Clouds Take the filtered point cloud as input to calculate the corresponding pick points of each point cloud and output the 3D pick point list.
Flip Poses’ Axes Rotate the point clouds obtained from the previous Step to make their directions roughly the same to facilitate subsequent picking. Then output the flipped pick point list.
Transform Poses Input the result of the previous step. Transform the coordinate system of the pick points.