Roughly Calculate Pick Points according to the Heat Map of Grasp Probability¶
Take the heat map of grasp probability, the original depth image, the color image and the point cloud in the region of interest as input, calculate and filter the plane pick points. The step procedure is shown in Figure 1.
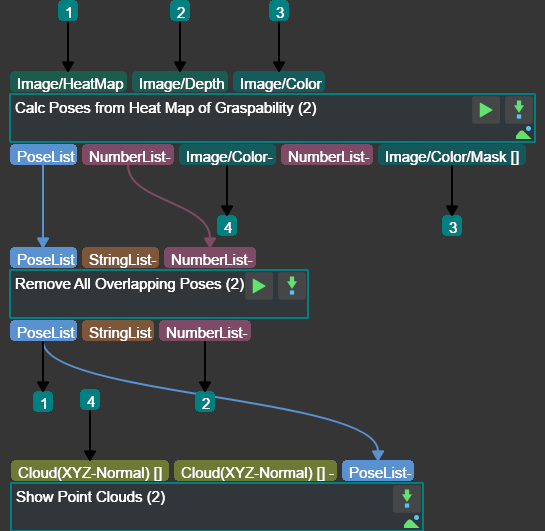
Figure 1 step procedure of calculating coarse pick points according to the heat map of grasp probability¶
The role of each step is as follows:
Calc Poses From Heat Map Of Graspability Based on the heat map of grasp probability, the original depth image and the color image, output the plane pick points that meet the requirements and the corresponding confidence. Mark the color image corresponding to the previous result and the graspable area of each pose.
Remove All Overlapping Poses Based on the plane pick points and their scores obtained from the previous step, remove the points that are too close and output the planar pick points that meet the requirements.
Show Point Clouds and Poses Displays the filtered plane pick points and the corresponding confidence on the color image.